

FPGA逻辑设计回顾(7)多比特信号的CDC处理方式之握手同步
前言
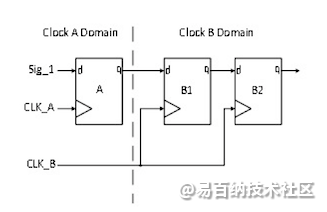
每种跨时钟域处理的方式都有其适用范围,例如:两级同步器,用于单比特信号处理,且是从慢时钟域到快时钟域:
还有反馈展宽同步方式,用于单比特信号同步,且从慢时钟域到快时钟域:FPGA逻辑设计回顾(4)亚稳态与单比特脉冲信号的CDC处理问题
Mux同步器,用于单向同步的多比特同步:
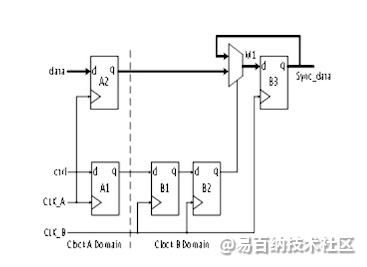
FPGA逻辑设计回顾(5)多比特信号的CDC处理方式之MUX同步器
异步FIFO用途倒是挺广,但是过于有时杀鸡用牛刀也是多次一举:
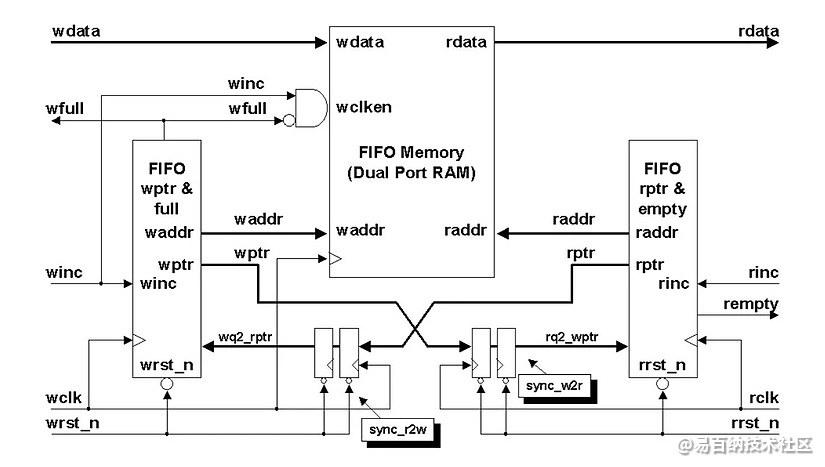
FPGA逻辑设计回顾(6)多比特信号的CDC处理方式之异步FIFO
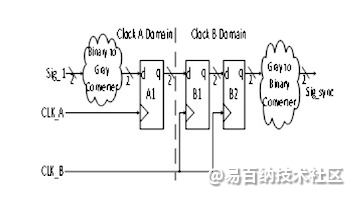
格雷码同步在异步FIFO的内部得以应用,用于读写指针的跨时钟域传输,在上述异步FIFO链接中也有讲到。
本文要介绍的CDC处理方式是握手同步,它适用于数据稳定(不频繁变化)情况下的数据跨时钟域同步。
看见了吧,这就是数字设计的多样性,针对不同的场景可以使用不同的同步方式。
这些方式都掌握是一件好事,一是可以锤炼自己的设计水平,另外,只有熟练掌握才能随机应变。还有,这是找工作的常考知识!
握手同步介绍
在这种同步方案中,无论源时钟和目的时钟之间的时钟周期比如何,都采用请求和确认机制来保证正确的数据采样到目的时钟域。这种技术主要用于不连续变化或非常频繁地变化的数据。
如下图表显示了这种实现方式:
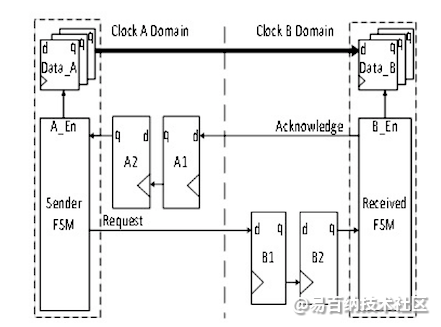
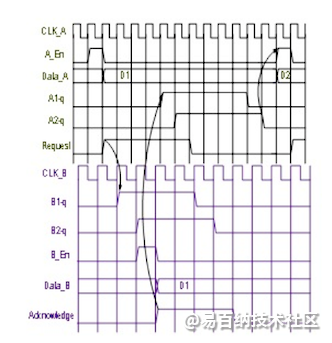
如下图握手同步的时序所示,数据应该在总线上保持稳定,直到从目的端接收到同步确认信号(A2-q),并且它(A2-q)变为低电平。
握手同步的RTL实现
虽然上面给出了实现框图,但是毕竟是框图,图中一个Sender FSM,以及Received FSM,没有给出实现细节,对初学者可能还像是空中楼阁一样,没什么实际的作用。
其实有一个技巧,就是看时序图,可以从时序图中得到握手同步的实现方式。
这也是作为一个设计者的素质,RTL代码,时序图,无缝切换,所谓,做逻辑的,不画时序图算什么?
从图中时序图,我们提炼出输入信号:
- clk_a, clk_b
- rst(这个图中没有,但是很有必要)
- a_en,data_a(这两者作为输入,可以当成一种协议,检测到a_en有效(下降沿)的时候,输入数据就更新,更新数据一直持续到a_en的下一个下降沿)
输出信号:
- b_en,这是对a_en的同步
- data_b_out,这是对b的同步
- ack_a,这是我个人想要加进来的,它是B时钟域的响应信号ack,同步到a时钟域后的信号,通知a时钟域(下降沿通知),可以发送下一个数据了。事实上,a_en就是该信号的下降沿;
好了,有了这些信息,可以进行RTL逻辑设计了:
我给出我的设计代码:
`timescale 1ns / 1ps
//////////////////////////////////////////////////////////////////////////////////
// Company:
// Engineer: 李锐博恩
// Create Date: 2021/01/16 00:34:50
// Module Name: syn_handshake
//////////////////////////////////////////////////////////////////////////////////
module syn_handshake(
input wire clk_a ,
input wire clk_b ,
input wire rst ,
input wire a_en , //来自于外部的使能信号,脉冲持续一个时钟周期
input wire [3:0] data_a_in , //外部输入信号
output reg [3:0] data_b_out ,
output wire b_en ,
output wire ack_a
);
//生成a_en的下降沿
reg a_en_d1 ;
reg a_en_d2 ;
reg a_en_neg ;
always@(posedge clk_a or posedge rst) begin
if(rst) begin
a_en_d1 <= 1'd0;
a_en_d2 <= 1'd0;
a_en_neg <= 1'd0;
end
else begin
a_en_d1 <= a_en;
a_en_d2 <= a_en_d1;
// a_en_neg <= ~a_en_d1 && a_en_d2;
a_en_neg <= ~a_en && a_en_d1;
end
end
//生成请求信号
reg a_req ;
always@(posedge clk_a or posedge rst) begin
if(rst) begin
a_req <= 1'd0;
end
else if(a_en_neg) begin
a_req <= 1'd1;
end
else if(a2_q_pos) begin //a_req 拉低条件
a_req <= 1'd0;
end
else begin
a_req <= a_req;
end
end
//请求信号a_req跨时钟域处理
reg b1_q, b2_q;
always@(posedge clk_b or posedge rst) begin
if(rst) begin
b1_q <= 1'd0;
b2_q <= 1'd0;
end
else begin
b1_q <= a_req;
b2_q <= b1_q;
end
end
//生成时钟域b内的数据使能信号
//b2_q信号的上升沿
//b时钟域对a时钟域的响应信号
reg b2_q_d1;
reg b2_q_d2;
reg b2_q_d3;
wire b_en;
reg ack_b;
always@(posedge clk_b or posedge rst) begin
if(rst) begin
b2_q_d1 <= 1'd0;
b2_q_d2 <= 1'd0;
b2_q_d3 <= 1'd0;
ack_b <= 1'd0;
end
else begin
b2_q_d1 <= b2_q;
b2_q_d2 <= b2_q_d1;
b2_q_d3 <= b2_q_d2;
ack_b <= b2_q_d2;
end
end
assign b_en = ~b2_q_d3 && b2_q_d2;
//b_en有效,则表示数据有效,可以采样a时钟域的数据了
always@(posedge clk_b or posedge rst) begin
if(rst) begin
data_b_out <= 4'd0;
end
else if(b_en) begin
data_b_out <= data_a_in;
end
end
//响应信号同步到a时钟域
//a2_q上升沿作为a_req拉低的条件
reg a1_q, a2_q;
reg a3_q ;
wire a2_q_pos;
always@(posedge clk_a or posedge rst) begin
if(rst) begin
a1_q <= 1'd0;
a2_q <= 1'd0;
a3_q <= 1'd0;
end
else begin
a1_q <= ack_b;
a2_q <= a1_q;
a3_q <= a2_q;
end
end
assign a2_q_pos = ~a3_q && a2_q;
assign ack_a = a2_q; //此信号作为a_en的反馈信号,a_en取此信号的下降沿
endmodule有的朋友,可能会说了,我看过其他的握手同步的设计方法,为什么代码和你的不一样,或者我看过你的其他篇,握手同步,但是为什么代码和以前的不一样;
这个嘛!不同时期写的嘛,以前我怎么写的,我也忘了。但是我相信是万变不离其中的。
握手同步的行为仿真
有了设计,没有仿真怎么能行,每一个设计都是需要仿真的,要不然怎么证明你的设计是没有问题的。
行为仿真是验证逻辑功能的关键一步!
本逻辑仿真的重点在于设计输入信号,输入信号中的重点在于我刚才说的握手同步是有适用场景的,因此,要设计这个场景的输入信号,这里要设计的是输入数据一定要是稳定的,不要频繁的变化;
如下我设计的仿真逻辑,data_a,只有在a_en有效的时候才更新,a_en有效,那必然是时钟域B同步完成了。这就相当于一个握手的过程完成了,协议达成, 成
交!
这里给出仿真平台:
`timescale 1ns / 1ps
//////////////////////////////////////////////////////////////////////////////////
// Company:
// Engineer: 李锐博恩
// Create Date: 2021/01/16 00:34:50
// Module Name: syn_handshake_tb
//////////////////////////////////////////////////////////////////////////////////
module syn_handshake_tb(
);
reg clk_a ;
reg clk_b ;
reg rst ;
reg a_en ; //来自于外部的使能信号,脉冲持续一个时钟周期
reg [3:0] data_a_in ; //外部输入信号
wire [3:0] data_b_out ;
wire b_en ;
wire ack_a ;
initial begin
clk_a = 1'd0;
forever begin
#2 clk_a = ~clk_a;
end
end
initial begin
clk_b = 1'd0;
forever begin
#3 clk_b = ~clk_b;
end
end
initial begin
rst = 1'd1;
#15
@(negedge clk_a);
rst = 1'd0;
end
reg ack_a_d1;
always@(posedge clk_a or posedge rst) begin
if(rst) begin
a_en <= 1'd1;
ack_a_d1 <= 1'd0;
end
else begin
ack_a_d1 <= ack_a;
a_en <= ~ack_a && ack_a_d1;
end
end
always@(posedge clk_a or posedge rst) begin
if(rst) begin
data_a_in <= 4'd0;
end
else if(a_en) begin
data_a_in <= $random;
end
end
syn_handshake u_syn_handshake(
.clk_a ( clk_a ),
.clk_b ( clk_b ),
.rst ( rst ),
.a_en ( a_en ),
.data_a_in ( data_a_in ),
.data_b_out ( data_b_out ),
.b_en ( b_en ),
.ack_a ( ack_a )
);
endmodule一个简单的TB文件!
仿真波形:
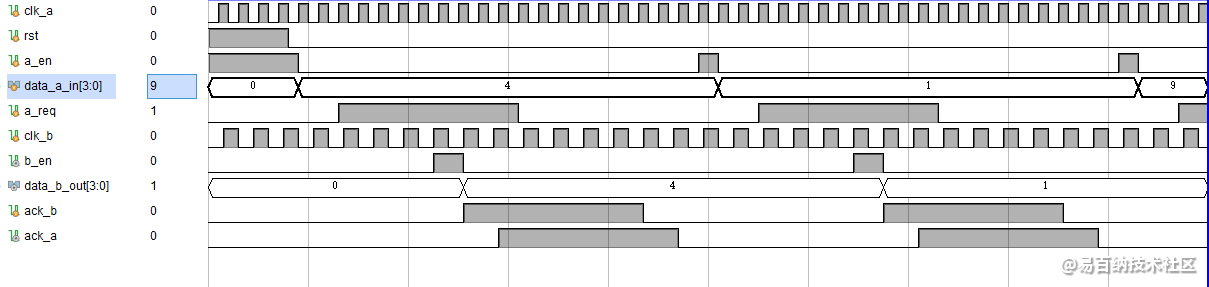
下面标出重点:
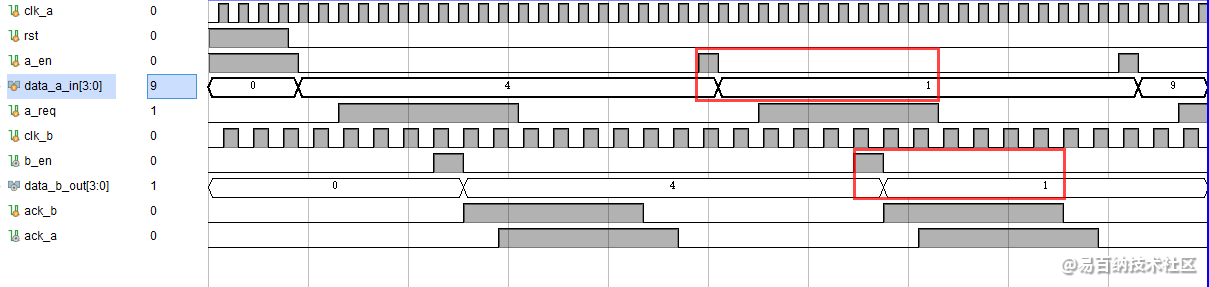
其他不说,红色方框内的信号表示输入信号已经同步到时钟域B了。
中间信号呢?下面也给出:
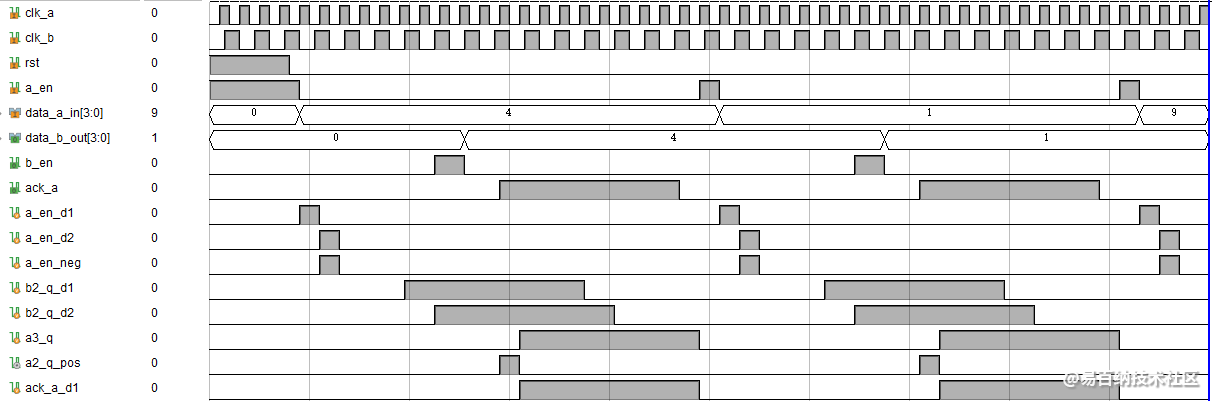
建议大家放到自己平台上仿真,然后对着代码以及仿真,分析实现的过程。
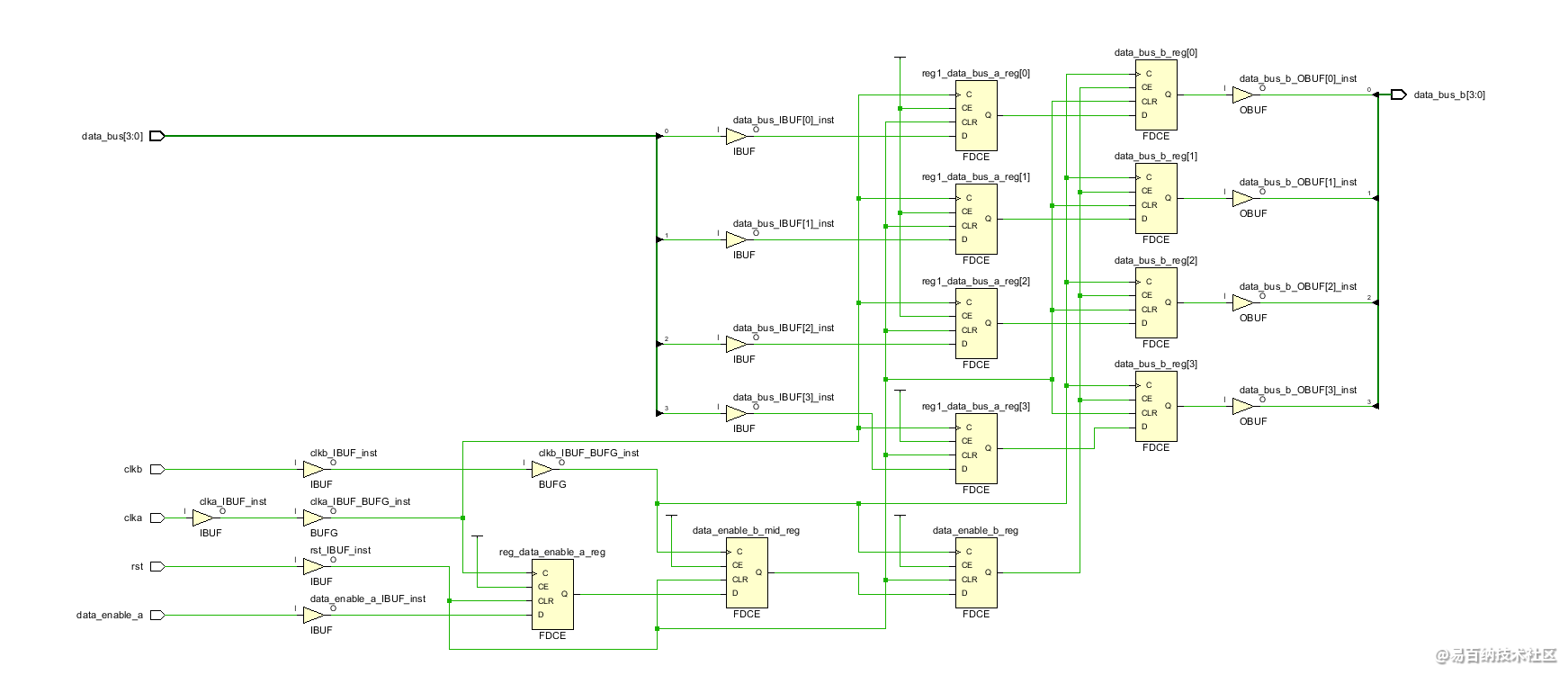
最后给出RTL原理图:

可见,我并没有如原理中所说,使用到状态机的方式,方法可能很多,选择适合你的吧。
再给出综合后的原理图,以验证我的设计是可综合的:
不得不说,这可能是我要总结的CDC的最后一种方式了。
也不一定,还有一些方法,说不定我有空了,还会总结几个,但基本就这些了,再见吧,朋友们。
参考资料
Synchronizer techniques for multi-clock domain SoCs & FPGAs
FIFO, handshake synchronizers a challenge for CDC analysis
Get those clock domains in sync
Crossing the abyss:asynchronous signals in a synchronous world
有空多读读这些英文资料,可能会有启发!
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:13480次2021-01-02 00:02:19
-
浏览量:9375次2021-01-09 02:07:52
-
浏览量:7648次2021-01-23 18:45:14
-
浏览量:9153次2020-12-27 18:30:21
-
浏览量:3259次2022-05-30 11:53:09
-
浏览量:14622次2021-01-01 02:53:29
-
浏览量:20273次2020-12-06 18:59:36
-
浏览量:11332次2020-12-13 19:59:59
-
浏览量:7748次2021-01-31 01:07:50
-
浏览量:6464次2021-01-31 04:24:47
-
浏览量:9129次2021-02-06 22:29:19
-
浏览量:6324次2021-03-17 23:24:53
-
浏览量:5693次2021-03-18 22:57:24
-
浏览量:7119次2021-01-30 01:09:16
-
浏览量:8019次2021-01-30 23:18:56
-
浏览量:7529次2021-03-14 02:34:44
-
浏览量:8840次2021-02-07 00:59:28
-
浏览量:7944次2021-03-15 23:18:36
-
浏览量:3640次2022-01-12 09:00:12
李锐博恩
一个努力写作的FPGA爱好者、从业者,CSDN博客专家,CSDN上万关注量,百万


-
60篇
-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
李锐博恩

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
