


项目核心是在Linux平台上利用摄像头采集人脸,并进行人脸识别。这个项目使用的是FFMPEG+OPENCV+虹软框架完成。
FFMPEG的主要工作是负责采集摄像头的数据并把摄像头数据发送给opencv。
Opencv的主要工作则是把摄像头数据转换成矩阵数据。
虹软的主要功能则是利用Opencv的数据进行数据检测和识别并且和人脸数据库进行比较,如果识别成功则显示这个人的姓名,并把数据显示出来。
1.虹软人脸识别
(1).初始化所有的固件,如虹软SDK的激活、sqlite3人脸数据库的初始化并存放到map
init_asfort_device函数是激活虹软SDKinit_face_data函数是把人脸识别库查询出来并存放到Map,Map的key是人脸的名称,Value是人脸的特征(特征是blob数据)
(2).初始化工作线程,这三个线程分别是视频采集线程、虹软识别线程、显示线程。这三个线程的关系如下图:
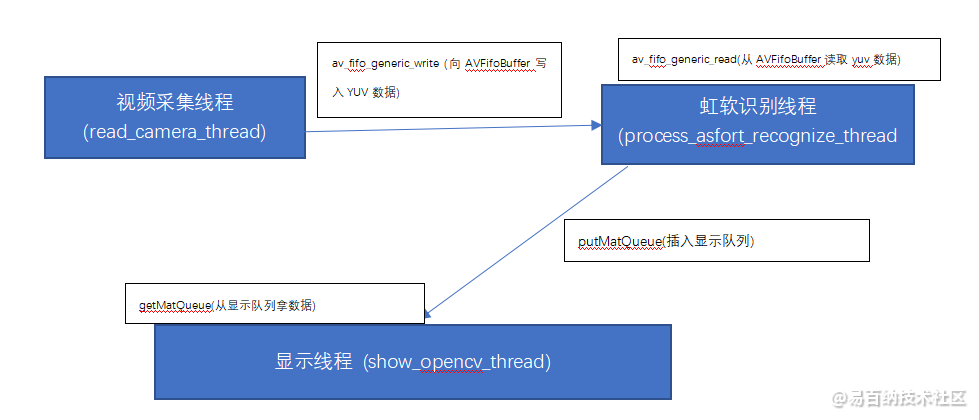
视频采集线程(read_camera_thread):利用FFMPEG去进行采集摄像头的数据,并把摄像头的YUV存放到缓存队列里面,这里的缓存队列使用的是AVFifoBuffer进行存储(操作的API是av_fifo_generic_write写入YUV数据)。
虹软识别线程(process_asfort_recognize_thread):从AVFifoBuffer队列里面取出YUV数据(操作的API是av_fifo_generic_read读取YUV数据)并利用OPENCV框架进行转换,转换完成之后,利用虹软人脸识别API进行识别操作。识别完成之后,则把识别结果存放到显示队列(putMatQueue)里面
视频显示线程(show_opencv_thread):从opencv_queue队列取出每一帧数据(getMatQueue操作)处理过后的数据,显示到播放器里面。
重点:这个项目重点在于多线程和队列的操作,一般一个大型的项目都需要用到多线程的操作。因为使用多线程能够充分利用CPU资源,并快速响应。这个项目使用了三个线程去处理,分别是视频采集线程、 虹软识别线程、 视频显示线程。而线程之间的通信则利用队列进行通信。
2.Rockx Face人脸识别流程
1.目前本项目用rockx_face框架进行人脸识别
本项目的流程是先初始化rv1126的输入设备节点还有HDR设备功能(HDR功能是因为我的设备需要开启HDR才能够正常显示,这个看具体的设备),还有VO设备节点(设备输出节点)。
1.1.VI设备的初始化:
VI_CHN_ATTRS vi_chn_attr;
vi_chn_attr.pcVideoNode = pDeviceName;
vi_chn_attr.u32Bufcnt = u32Bufcnt;
vi_chn_attr.u32Width =u32width;
vi_chn_attr.u32Height = u32Height;
vi_chn_attr.enPixFmt = IMAGE TYPE NV12;
vi_chn_attr.enBufType =VI_CHN_BUF_TYPE_MMAP;
vi_chn_attr.enWorkMode =VI_WORK_MODE_NORMAL;
ret =RK_MPI_VI_SetchnAttr(s32CamId, l,&vi_chn_attr);
ret |= RK_MPI_VI_Enablechn(s32camId, 1);
if(ret){
printf("ERROR: create VI[o] error! ret=d\n",ret);
return 0;
}
上述代码是VI设备的初始化操作,这里涉及的参数包括pcVideoNode(设备节点)、u32Width(长度)、u32Height(高度)、enPixFmt(像素类型)、enBufType(VI捕获视频缓冲区计数)、enWorkMode(VI通道工作模式)。
1.2.HDR设备的初始化:
rk_aiq_working_mode_t hdr mode = RK_AIQ_WORKING_MODE_NORMAL;
SAMPLE_COMM_ISP_Init(hdr_mode, RK_FALSE);
SAMPLE_COMM_ISP_Run();
SAMPLE_COMM_ISP_SetFrameRate(25);
if(poutPath){
g_output_file = fopen(poutPath,"w");
if(!g_output_file){
printf("ERROR: open file:&s fail,exit\n", poutPath);
return 0;
}
}
上述代码则是启动HDR功能的流程代码,这里直接调用SAMPLE_COMM_ISP_Run API进行HDR功能的开启。
1.3. VO设备的初始化
VO_CHN_ATTR_S stVoAttr ={0};stVoAttr.pcDevNode ="/dev/dri/card";stVoAttr.emPlaneType = VO_PLANE_OVERLAY;stVoAttr.enImgType = IMAGE_TYPE_NV12;stVoAttr.u16Zpos = 0;stVoAttr.stImgRect.s32X = 0;stVoAttr.stImgRect.s32Y = 0;stVoAttr.stImgRect.u32Width = disp width;stVoAttr.stImgRect.u32Height = disp height;stVoAttr.stDispRect.s32X = 0;stVoAttr.stDispRect.s32Y = 0;stVoAttr.stDispRect.u32Width = disp width;stVoAttr.stDispRect.u32Height = disp height;ret = RK MPI Vo Createchn(0,&stVoAttr);if(ret){ printf("Create vo[0] failed! ret=%d\n", ret); return -1;}
上述代码是VO设备的初始化,这里涉及的参数包括:pcDevNode(输出设备节点)、emPlaneType(视频输出图层类型)、enImgType(视频输出类型)、stImgRect(视频输入图像格式)、stDispRect(输出图层尺寸参数)。
2.初始化完成之后,则开启两个线程进行开发,分别是rockx_rga_vi_test_thread线程、rockx_process_vo_thread线程。
rockx_rga_vi_test_thread线程主要功能是,从rv1126摄像头数据拿到原始数据(NV12)数据,并利用rockx框架进行人脸检测、人脸识别、实时画框等操作。并把处理过后的原始数据存放到队列rockx_queue里面。
rockx_process_vo_thread线程的主要功能是,阻塞rockx_queue队列操作,等待数据的到来。当rockx_queue有数据来的时候,则把处理过后的数据传送给VO设备。
具体的看流程图:

3.YOLOV3目标识别说明
1.加载YOLOV3的文件,并把标签名称存放到容器里面
std::ifstream ifs(yolov3_model_file.c_str());
if (!ifs.is_open())
{
std::cerr << "File " + yolov3_model_file + " not found";
return -1;
}
std::string line;
while (std::getline(ifs, line))
{
classes.push_back(line);
}
2.初始化工作线程,这三个线程分别是视频采集线程、yolov3识别线程、显示线程。这三个线程的关系如下图:
视频采集线程(read_camera_thread):利用FFMPEG去进行采集摄像头的数据,并把摄像头的YUV存放到缓存队列里面,这里的缓存队列使用的是AVFifoBuffer进行存储(操作的API是av_fifo_generic_write写入YUV数据)。
Yolov3识别线程(process_avframe_dnn_thread):从AVFifoBuffer队列里面取出YUV数据(操作的API是av_fifo_generic_read读取YUV数据)并利用OPENCV框架进行转换,转换完成之后,利用Opencv DNN API进行YOLOV3识别操作(具体的YOLOV3识别步骤非常复杂,后面会慢慢讲到)。识别完成之后,则把识别结果存放到显示队列(putMatQueue)里面.
视频显示线程(show_opencv_thread):从opencv_queue队列取出每一帧数据(getMatQueue操作)处理过后的数据,显示到播放器里面。
重点:这个项目重点在于多线程和队列的操作,一般一个大型的项目都需要用到多线程的操作。因为使用多线程能够充分利用CPU资源,并快速响应。这个项目使用了三个线程去处理,分别是视频采集线程、 YOLOV3识别线程、 视频显示线程。而线程之间的通信则利用队列进行通信。
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:3369次2024-05-24 18:51:13
-
浏览量:5432次2021-03-30 17:33:20
-
浏览量:2651次2024-05-24 17:28:44
-
浏览量:18943次2024-01-04 14:35:55
-
浏览量:2934次2024-05-24 17:11:01
-
浏览量:3568次2024-05-24 19:05:42
-
浏览量:4830次2021-04-01 13:54:47
-
浏览量:4864次2021-04-02 09:47:41
-
浏览量:3092次2022-10-09 10:38:23
-
浏览量:8047次2021-04-01 17:04:01
-
浏览量:6667次2021-04-01 16:47:04
-
浏览量:4016次2023-08-08 13:59:23
-
浏览量:7394次2022-05-11 15:14:51
-
浏览量:8688次2022-05-31 11:14:16
-
浏览量:4451次2022-09-03 09:03:36
-
浏览量:6870次2021-04-01 16:50:31
-
浏览量:2894次2022-12-16 16:27:02
-
浏览量:2370次2024-01-23 11:28:32
-
浏览量:4755次2024-01-18 18:05:38


-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖



举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
