一、系统准备
1、获取镜像(ubuntu、openEuler)
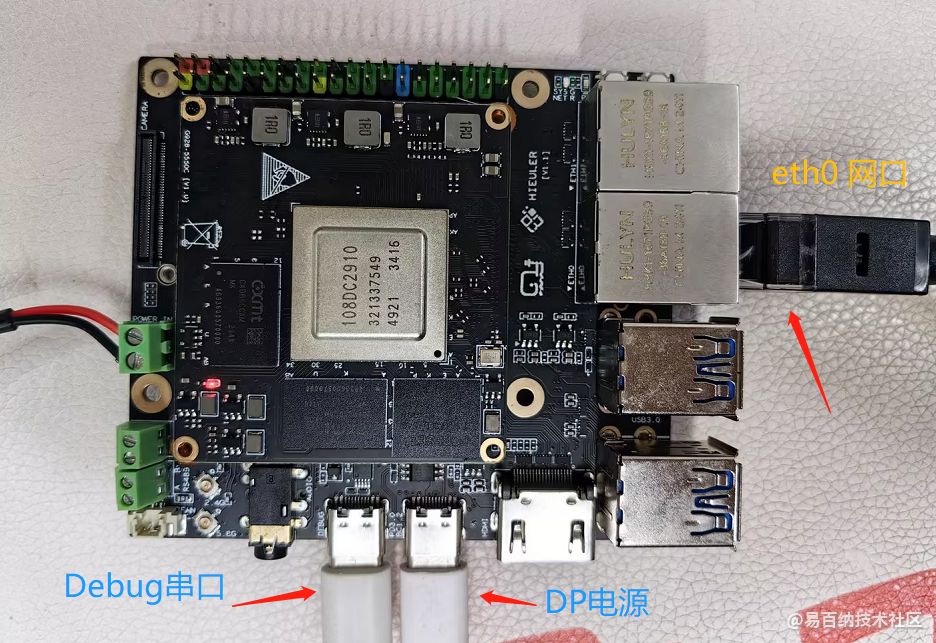
开发前准备,开发板(购买链接:https://www.ebaina.com/ai/58 ) 及其连接如图所示:
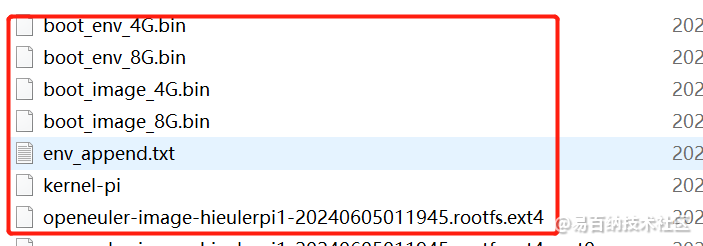
1)方式一:从SDK中拿到ubuntu、openEuler和系统镜像,下载镜像后可以解压得到如下文件:

2)方式二:直接使用openEuler-ROS镜像
该方法可以直接下载带ROS的openEuler镜像,具体参考:海鸥派镜像获取 — openEuler Embedded在线文档 24.03 documentation
需要下载的镜像内容包括以下四个文件:
boot_image_[MEM_SIZE].bin u-boot镜像,其中MEM_SIZE是开发板的内存大小boot_env_[MEM_SIZE].bin u-boot环境变量分区kernel-pi Linux内核openeuler-image-hieulerpi1-[时间戳].rootfs.ext4 根文件系统
注:(openEuler ros系统烧录到手里的海鸥派开发板后,会在系统启动过程中国一直报USB打开错误的error,不能正常使用。初步判断是手里的欧拉派和镜像不匹配。最终没有使用该方式安装ROS)。
3)方式二:自行编译镜像(没有需要修改的内容不推荐该方式,比较费时间)
Ubuntu、Linux和openEuler参考:海鸥派 Euler Pi SDK编译开发指南.pdf
openEuler在线文档可参考:海鸥派镜像构建与使用 — openEuler Embedded在线文档 24.03 documentation
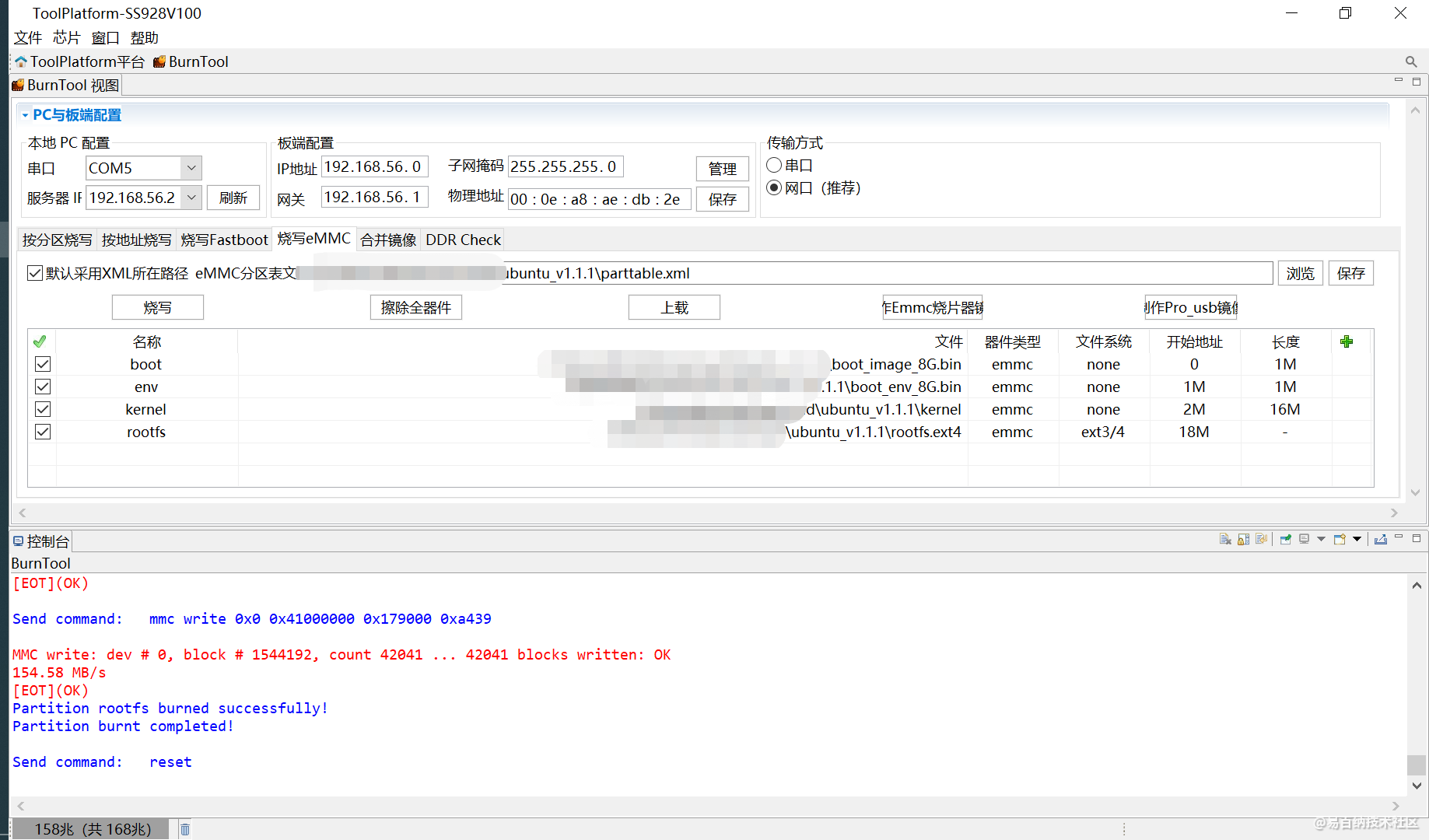
2、烧录镜像
SD卡烧录参考:海鸥派 Euler Pi 固件烧写及升级.pdf
没有SD卡推荐使用Platform Tool工具。目前Platform Tool烧录有个机制导致烧录镜像时很慢,会把文件系统拆开为每32Mb一份固件烧录。烧录时的分区表如下:
二、网络配置
除了openEuler支持wifi,其他系统都不支持WIIF,所以这里讲解如何配置开发板以太网,让开发板可以正常访问公网。本节开始前需要做如下准备:
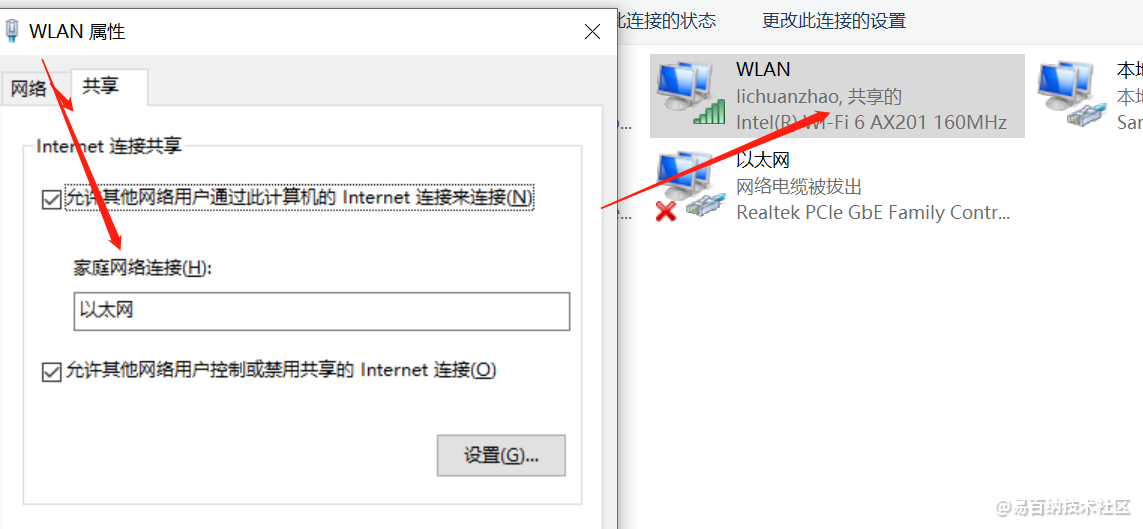
1、PC共享网络
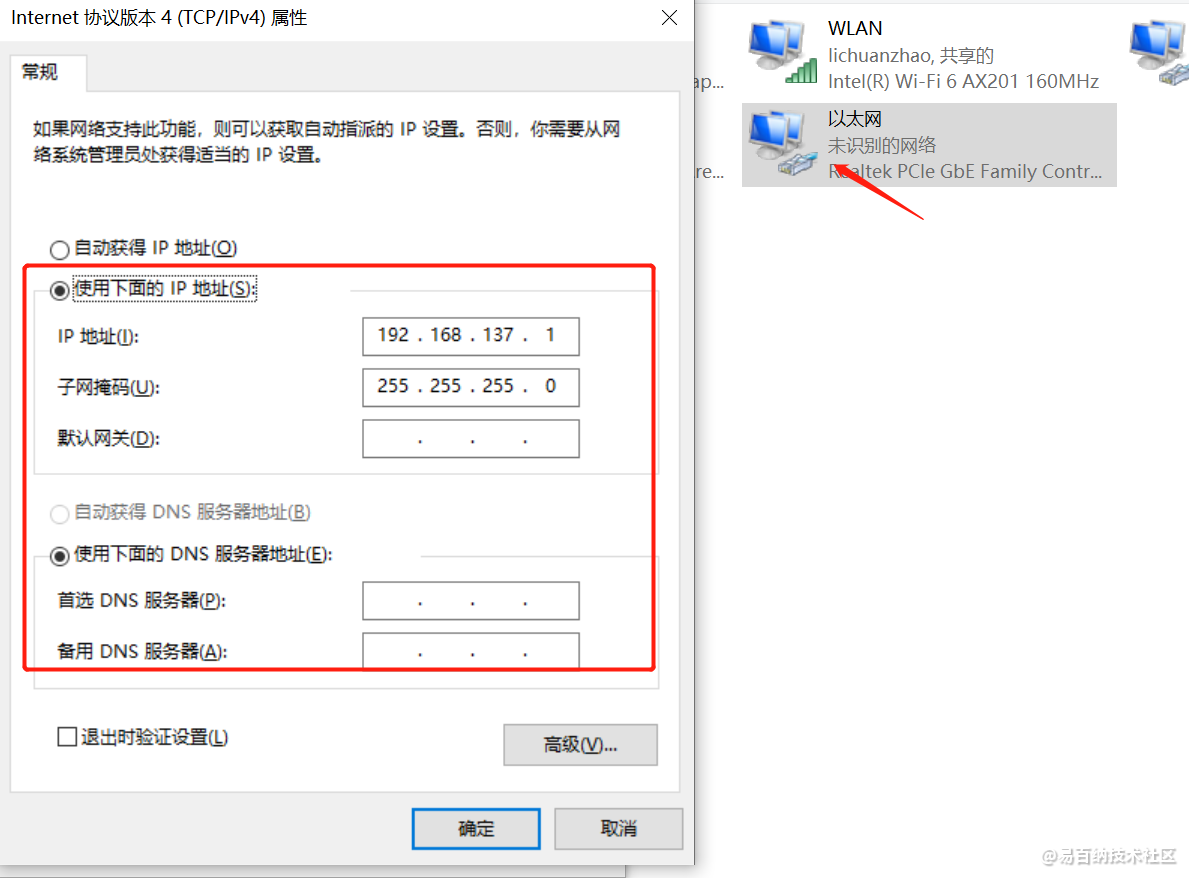
1)设置电脑wifi网卡共享到开发板以太网口
2)设置开发板以太网口的IP为【使用以下配置】
3)开发板配置eth0的IP、网关地址、DNS服务地址
ifconfig eth0 192.168.137.2
route add default gw 192.168.137.1
vi /etc/resolv.conf
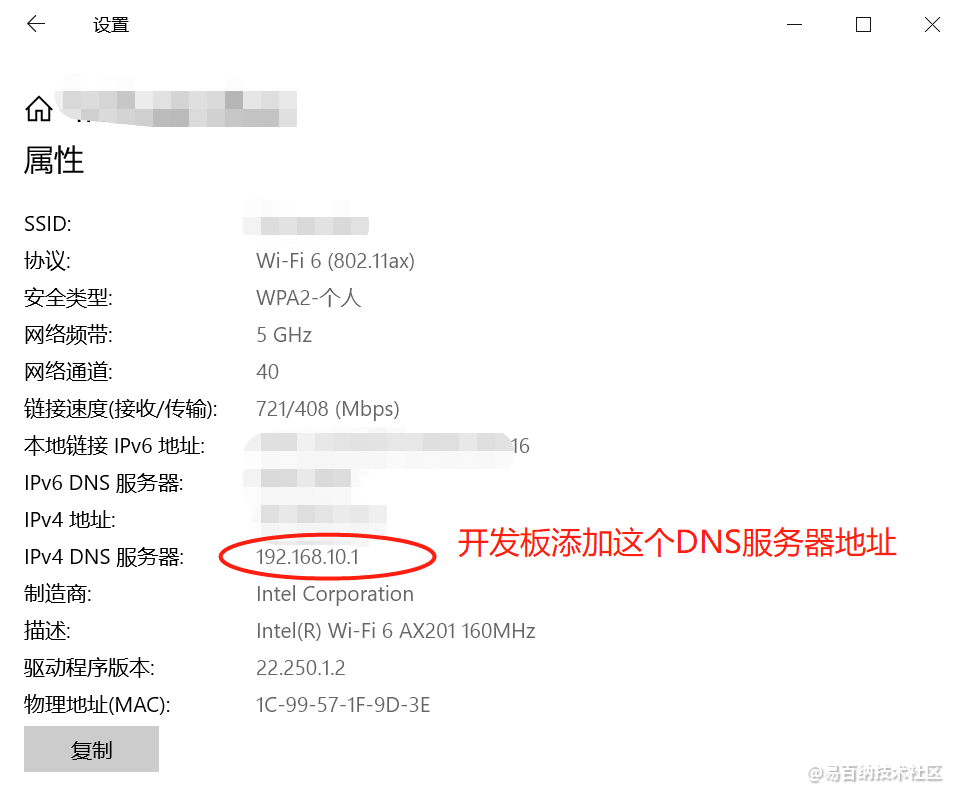
nameserver 192.168.10.1
查看wifi网卡的DNS:
2、连接路由器
开发板网口连接到路由器时,只需要配置开发板eth0的IP、网关地址、DNS服务地址即可。
3、使用ssh登录
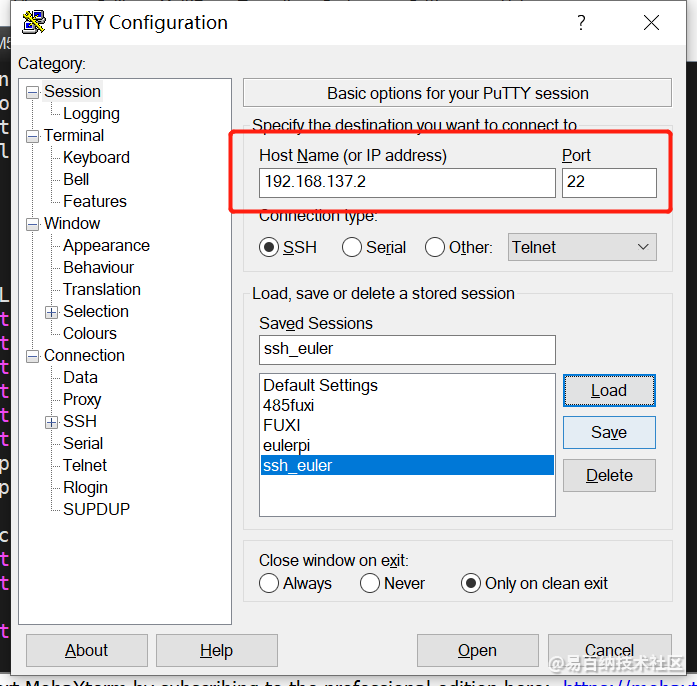
网络配置完成后,可以使用ssh访问开发板,以PuTTY为例,登录配置如下:
三、安装ROS2
下面以ubuntu为例介绍ROS2安装过程,openEuler可参考安装指令(bash指令不是apt是yum)。目前ubuntu是20.04,对应ROS foxy版本,安装步骤如下:
0.安装python3.8.10和curl
apt install python3.9
apt install curl
1.设置源:
apt update && apt install curl gnupg2 lsb-release
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | apt-key add -
2.添加ROS2的源并更新:
sh -c 'echo "deb [arch=$(dpkg --print-architecture)] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-latest.list'
更新ROS2包:
apt update
3.安装ROS2
可以选择基础包,(因为没有桌面系统,不包括ROS2 Dashing Diademata包):
apt install ros-foxy-ros-base python3-argcomplete
桌面全量版本,包含ROS2 Dashing Diademata包
sudo apt install ros-foxy-desktop python3-argcomplete
4.环境设置:
echo "source /opt/ros/foxy/setup.bash" >> ~/.bashrc
source ~/.bashrc
5.安装arg完全工具和其他依赖项:
apt install -y python3-argcomplete python3-colcon-common-extensions python3-rosdep python3-vcstool
apt install ros-dev-tools
6.初始化rosdep:
rosdep init
rosdep update
以上步骤将安装ROS2 版本。如果需要安装其他版本的ROS,请替换步骤4中的包名称为对应的版本,例如ros-foxy-desktop安装Foxy Fitzroy的桌面版。
四、运行foxy ROS2
1、基础版本验证
ros2 launch --hlep

2、桌面版本案例验证
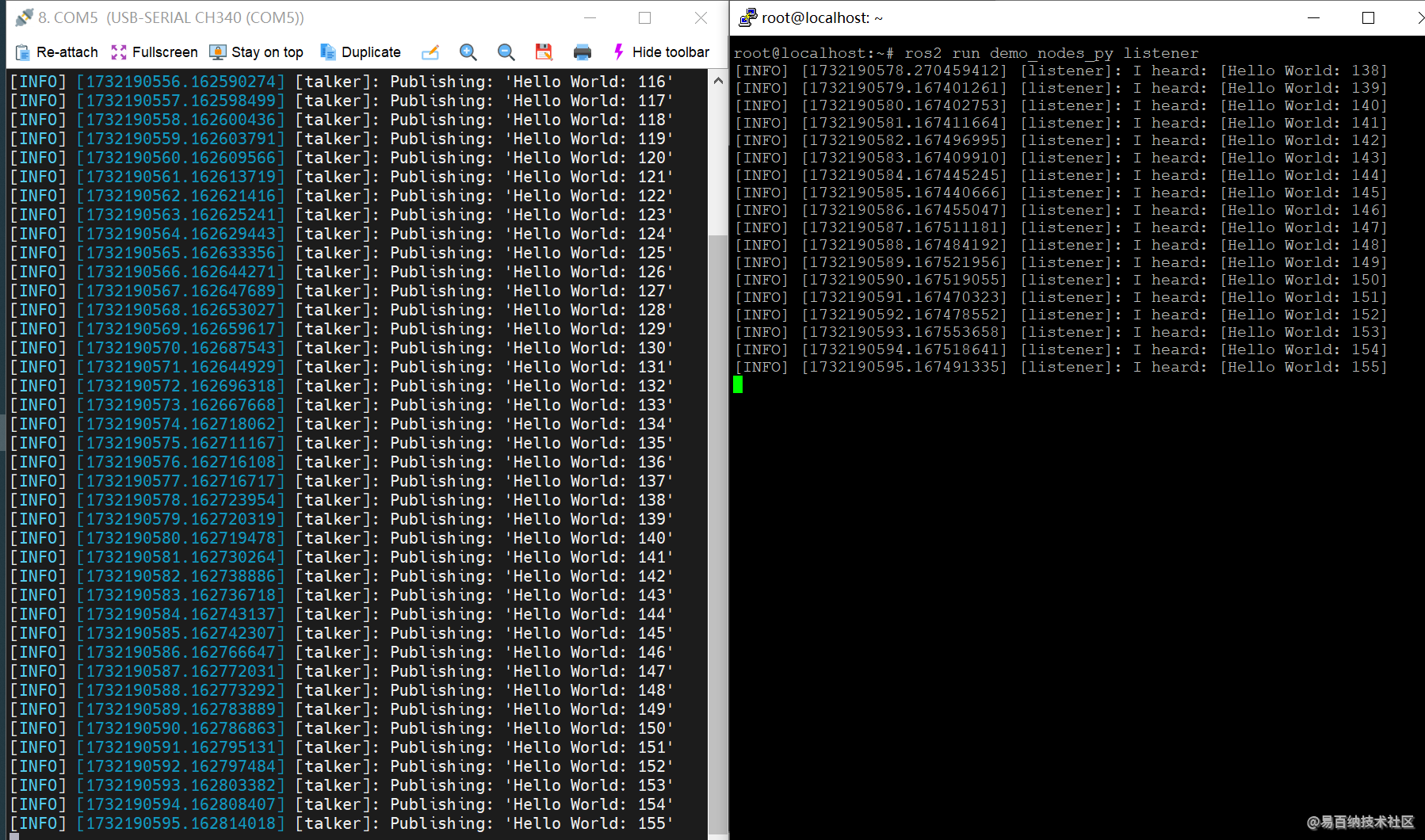
桌面版本有默认案例可以验证,一个发布者taker向一个监听者listener发布“hello World!”的消息,终端执行
source /opt/ros/foxy/setup.bash
ros2 run demo_nodes_cpp talker
source /opt/ros/foxy/setup.bash
ros2 run demo_nodes_py listener
效果如下图:
也可以使用python自己实现一个案例,在两个不同的终端中运行这两个脚本,首先是talker.py,然后是listener.py。你会看到listener.py终端打印出talker发送的消息。参考如下
''' talker.py '''
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
class Talker(Node):
def __init__(self):
super().__init__('talker')
self.publisher_ = self.create_publisher(String, 'topic', 10)
self.timer = self.create_timer(0.5, self.timer_callback)
self.i = 0
def timer_callback(self):
msg = String()
msg.data = 'Hello World! %d' % self.i
self.publisher_.publish(msg)
self.get_logger().info('Published: "%s"' % msg.data)
self.i += 1
def main(args=None):
rclpy.init(args=args)
talker = Talker()
rclpy.spin(talker)
talker.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
'''listener.py'''
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
class Listener(Node):
def __init__(self):
super().__init__('listener')
self.subscription = self.create_subscription(
String,
'topic',
self.callback,
10)
def callback(self, msg):
self.get_logger().info('I heard: "%s"' % msg.data)
def main(args=None):
rclpy.init(args=args)
listener = Listener()
rclpy.spin(listener)
listener.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()




 微信扫码分享
微信扫码分享 QQ好友
QQ好友











