

研究团队开发防汗可穿戴机器人传感器


可拉伸微针胶贴片(SNAP)的设计和工作概念。(A) 显示 SNAP 整体系统配置和应用的示意图。(B) SNAP的分解图示意图,由可拉伸的蛇形互连、镀金硅微针和由Ag薄片-硅复合材料制成的ECA组成。(C) 显示 SNAP 高度机械顺应性的光学图像
新型肌电图(EMG)传感器技术,可实现可穿戴机器人的长期稳定控制,不受佩戴者汗水和死皮的影响,最近受到关注。可穿戴机器人是用于老年人和中风或创伤恢复患者的各种康复治疗的设备。
由韩国科学技术院电气工程学院(EE)的Jae-Woong Jung教授和韩国科学技术院机械工程系(ME)的Jung Kim教授领导的联合研究团队成功开发了一种可拉伸和粘附的微针传感器,该传感器可以在不受用户皮肤状态影响的情况下进行高水平的电感知生理信号。
为了让可穿戴机器人识别人体运动背后的意图并将其用于康复治疗,它们需要一个可穿戴的电生理传感器来提供 精确的肌电图测量。然而,现有的传感器通常会随着时间的推移而显示出信号质量的下降,并且会受到用户皮肤状况的极大影响。此外,传感器较高的机械硬度会导致噪声,因为接触表面无法跟上皮肤的变形。这些缺点限制了可穿戴机器人的可靠、长期控制。
然而,最近开发的技术有望实现长期和高质量的肌电图测量,因为它使用可拉伸和粘性导电基板,集成了微针阵列,可以轻松穿透角质层而不会引起不适。
凭借其出色的性能,该传感器有望在很长一段时间内稳定地控制可穿戴机器人,而不管佩戴者的皮肤状况如何变化,并且不需要准备步骤来去除皮肤表面的汗水和死细胞。
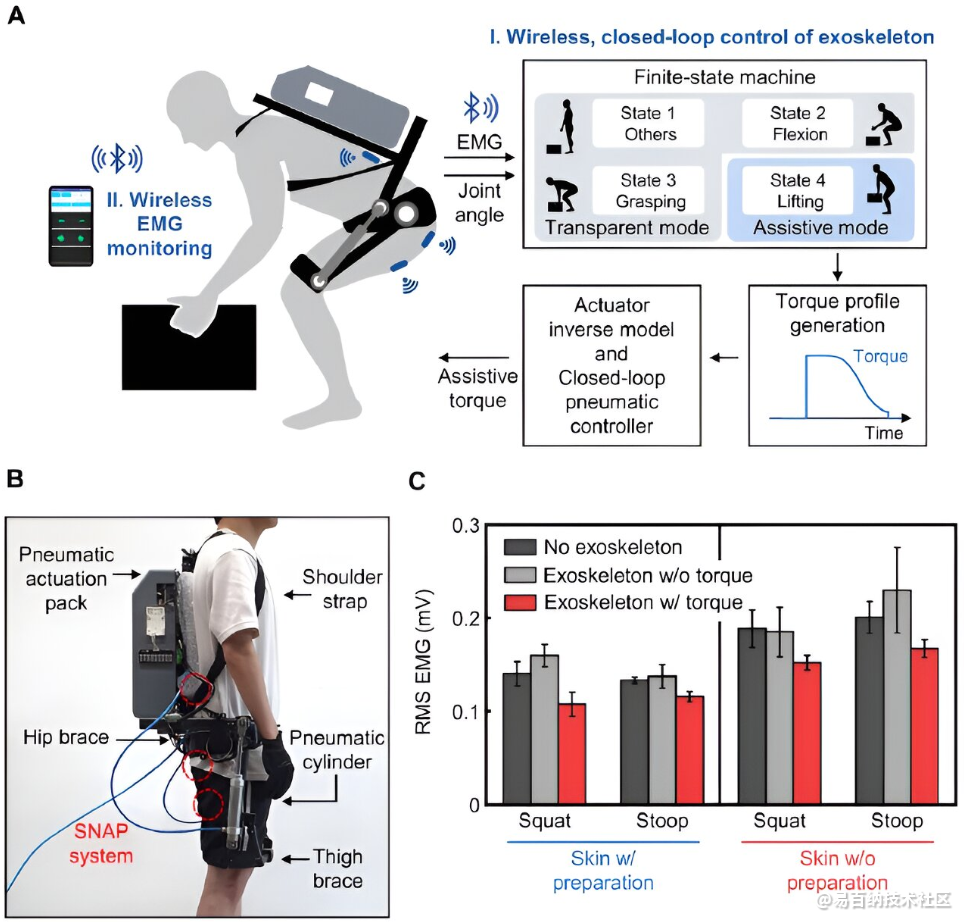
演示无线可拉伸微针粘合贴片 (SNAP) 系统作为人机界面 (HMI),用于外骨骼机器人的闭环控制。(A) 描绘外骨骼机器人的系统架构和控制策略的插图。(二)气动背支撑外骨骼系统的硬件配置。(C) 肌电图 (EMG) 的均方根 (RMS) 比较,有和没有机器人辅助的预处理皮肤和未预处理的皮肤
研究团队通过将微针集成到软硅聚合物基板中,创造了一种可拉伸和粘附的微针传感器。坚硬的微针穿透角质层,角质层具有很高的电阻。
该传感器可以有效降低与皮肤的接触电阻,无论是否受到污染,都能获得高质量的电生理信号。同时,柔软粘性的导电基材可以适应皮肤表面,并随着穿着者的运动而拉伸,提供舒适的贴合度,并将运动引起的噪音降至最低。
为了验证新贴片的可用性,研究团队使用可穿戴机器人进行了运动辅助实验。他们将微针贴片贴在用户的腿上,在那里它可以感知肌肉产生的电信号。然后,传感器将检测到的意图发送给可穿戴机器人,使机器人能够帮助佩戴者更轻松地举起重物。
领导这项研究的Jae-Woong Jung教授说:“开发的可拉伸和粘性微针传感器可以稳定地检测EMG信号,而不会受到用户皮肤状态的影响。通过这种方式,我们将能够以更高的精度和稳定性控制可穿戴机器人,这将有助于使用机器人的患者的康复。
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:1239次2023-12-04 09:35:44
-
浏览量:1472次2023-11-22 10:42:51
-
浏览量:3164次2020-07-30 09:14:09
-
浏览量:1765次2023-02-16 19:14:05
-
浏览量:1219次2023-08-09 14:00:57
-
浏览量:1299次2023-07-28 10:01:52
-
浏览量:1462次2023-01-31 09:31:36
-
浏览量:3475次2020-11-13 10:52:46
-
浏览量:1161次2023-07-22 14:36:23
-
浏览量:1397次2023-02-11 08:57:50
-
浏览量:2635次2019-11-08 14:34:31
-
浏览量:1919次2023-03-20 10:56:09
-
浏览量:2293次2020-04-24 10:38:46
-
浏览量:2456次2022-12-08 11:08:13
-
浏览量:1968次2019-08-02 14:58:25
-
浏览量:3320次2020-07-29 14:50:28
-
浏览量:2049次2023-04-23 09:38:45
-
2020-10-30 15:20:19
-
浏览量:3437次2020-10-29 10:35:06



-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖

hei-boy

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
