

camera调试:RK3588 MIPI/DVP camera关键配置

文章目录
前言
上一篇文章介绍了如何在RK3588上面点亮一个sensor,以MIPI camera IMX577为例进行介绍的,从前面的文章也知道,RK3588最多支持6路MIPI camera,一路DVP,因此这篇文章作为补充,分别介绍一下MIPI camera和DVP camera的配置重点。
一、常用camera接口介绍
按照不同的接口进行分类,常见的camera有:USBcamera、MIPI camera、DVP camera。
1、USB camera
USB Camera常见的数据格式有:YUYV/MJPEG/H.264 YUYV:传输的是YUV数据,数据量很大,分辨率和帧率较低,一般由后端对数据进行再处理,用于一些特殊用途(虹膜、红外人脸识别等)。MJPEG:一般用于分辨率相对较低的USB Camera(720P,VGA),传输数据较大。H.264:一般用于分辨率较高的USB Camera(1080p,720p),传输数据较小。
2、MIPI camera
MIPI为低压差分信号,传输速度快,抗干扰能力强,一般支持800万及以上像素的camera。目前主流手机camera模组都使用MIPI传输,传输时使用4对差分数据信号和1对差分时钟信号。
3、DVP camera
DVP Camera或称为并口Camera,接口如下图所示,一般支持BT601/BT656/BT1120数据的传输。DVP是并口传输,速度相对较慢,传输的带宽较低,一般用于500万像素以下的camera。需要使用PCLK时钟、VSYNC场同步、HSYNC行同步、D[0:11]并口数据,可以是8/10/12bit/16bit数据位大小。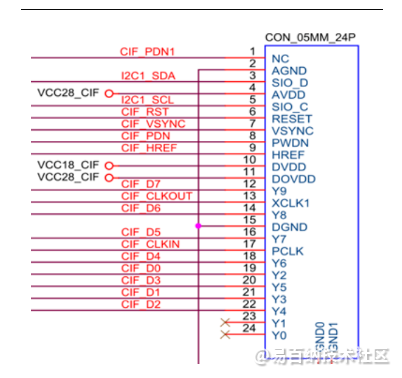
二、RK3588 调试
1、概述
连接框图如下所示,这边简单介绍一下RK3588 camera配置的关键要点。
根据上述的结构图可以大概看出MIPI和DVP分别是如何连接的,关键点如下:
rk3588支持两个dcphy,节点名称分别为csi2_dcphy0/csi2_dcphy1。每个dcphy硬件支持RX/TX同时使用,对于camera输入使用的是RX。支持DPHY/CPHY协议复用;需要注意的是同一个dcphy的TX/RX只能同时使用DPHY或同时使用CPHY。
rk3588支持2个dphy硬件,这里我们称之为dphy0_hw/dphy1_hw,两个dphy硬件都可以工作在full mode 和split mode两种模式下。1. dphy0_hw 和 dphy1_hw
full mode:节点名称使用csi2_dphy0 和 csi2_dphy3,最多支持4 lane。
split mode:拆分成2个phy使用,分别为csi2_dphy1(使用0/1 lane)、csi2_dphy2(使用2/3 lane),dphy1_hw 则拆分成csi2_dphy4和csi2_dphy5,每个phy最多支持2 lane。
当dphy0_hw使用full mode时,链路需要按照csi2_dphy1这条链路来配置,但是节点名称csi2_dphy1需要修改为csi2_dphy0,软件上是通过phy的序号来区分phy使用的模式。dphy1_hw同理。
使用上述mipi phy节点,需要把对应的物理节点配置上;csi2_dcphy0_hw/csi2_dcphy1_hw/csi2_dphy0_hw/csi2_dphy1_hw
每个mipi phy都需要一个csi2模块来解析mipi协议,节点名称分别mipi0_csi2~mipi5_csi2。
rk3588所有camera数据都需要通过vicap,再链接到isp。rk3588仅支持一个vicap硬件,这个vicap支持同时输入6路mipi phy,及一路dvp数据,所以我们将vicap分化成rkcif_mipi_lvds~rkcif_mipi_lvds5、rkcif_dvp等7个节点,各个节点的绑定关系需要严格按照框图的节点序号配置。
每个vicap节点与isp的链接关系,通过对应虚拟出的XXX_sditf来指明链接关系。
rk3588支持2个isp硬件,每个isp设备可虚拟出多个虚拟节点,软件上通过回读的方式,依次从ddr读取每一路的图像数据进isp处理。对于多摄方案,建议将数据流平均分配到两个isp上。
直通与回读模式:
直通:指数据经过vicap采集,直接发送给isp处理,不存储到ddr。需要注意的是hdr直通时,只有短帧是真正的直通,长帧需要存在ddr,isp再从ddr读取。
回读:指数据经过vicap采集到ddr,应用获取到数据后,将buffer地址推送给isp,isp再从ddr获取图像数据。
再dts配置时,一个isp硬件,如果只配置一个虚拟节点,默认使用直通模式,如果配置了多个虚拟节点默认使用回读模式。
2、RK3588 MIPI配置
RK3588最多 情况下可以使用4个2lane,2个4lane的MIPI接口camera,关键配置注意如下:
驱动接口配置:
驱动主要注意g_mbus_config接口的配置,该接口需要配置使用的是DVP接口还是MIPI接口,是MIPI DPHY还是MIPI CPHY,例如IMX577配置为V4L2_MBUS_CSI2_DPHY;其次,若是MIPI接口,该接口还需要配置lane数,IMX577配置为4lane;最后还需要配置虚拟通道数,如IMX577,线性模式配置一个通道,HDR模式则需要配置两个通道,若是多路vc的
static int imx577_g_mbus_config(struct v4l2_subdev *sd, unsigned int pad,
struct v4l2_mbus_config *config)
{
struct imx577 *imx577 = to_imx577(sd);
const struct imx577_mode *mode = imx577->cur_mode;
u32 lane_num = imx577->bus_cfg.bus.mipi_csi2.num_data_lanes;
u32 val = 0;
val = 1 << (lane_num - 1) |
V4L2_MBUS_CSI2_CHANNEL_0 |
V4L2_MBUS_CSI2_CONTINUOUS_CLOCK;
if (mode->hdr_mode != NO_HDR)
val |= V4L2_MBUS_CSI2_CHANNEL_1;
config->type = V4L2_MBUS_CSI2_DPHY;
config->flags = val;
return 0;
}
dts配置
dts配置可以参考上一篇文章的IMX577的配置,这边主要强调几个重点:
data-lanes:配置lane数,如果是4lane则为< 1 2 3 4 >,2lane则为< 1 2 >;
camera-module-name和camera-module-lens-name:RAW sensor跑aiq时会用到;
RAW sensor配置:sensor->csi2_dphy->mipi_csi->rkcif_mipi_lvds … rkcif_mipi_lvds_stdif->rkisp_vir
YUV/RGB888 sensor的配置:sensor->csi2_dphy->mipi_csi->rkcif_mipi_lvds
YUV或者RGB888的sensor,一般自带isp,直接输出YUV422的图像,不需要经过RK3588的isp,因此直接在vicap级存储到ddr即可。
3、RK3588 DVP camera
RK3588有一个DVP接口,支持BT601/BT656/BT1120等,同样的,如果是RAW的sensor,需要配置到ISP,如果是YUV的,则不需经过ISP,关键配置如下:
BT601接口:
BT601接口配置关键点:
hsync-active/vsync-active必须配置,用于v4l2框架异步注册识别BT601接口,若不配置会识别为BT656接口;
pclk-sample/bus-width可选;
必须在sensor驱动的g_mbus_config接口中,通过flag指明当前sensor的hsync-acitve/vsyncactive/pclk-ative的有效极性,否则会导致无法收到数据;
pinctrl需要引用对,以对bt601相关gpio做相应iomux,否则会导致无法收到数据;
驱动接口配置如下:
static int gc2145_g_mbus_config(struct v4l2_subdev *sd, unsigned int pad_id,
struct v4l2_mbus_config *config)
{
struct gc2145 *gc2145 = to_gc2145(sd);
config->type = V4L2_MBUS_PARALLEL;
config->flags = V4L2_MBUS_HSYNC_ACTIVE_HIGH |
V4L2_MBUS_VSYNC_ACTIVE_LOW |
V4L2_MBUS_PCLK_SAMPLE_RISING;
return 0;
}
dts配置与BT656和BT1120基本相同,这里不再重复,参考下面BT656/BT1120即可;
BT656/BT1120:
配置关键点如下:
hsync-active/vsync-active不要配置,否则v4l2框架异步注册时会识别为BT601;
pclk-sample/bus-width可选;
必须在sensor驱动的g_mbus_config接口中,通过flag变量指明当前sensor的pclk-ative的有效极性,否则会导致无法收到数据;
必须实现v4l2_subdev_video_ops中的querystd接口,指明当前接口为ATSC接口,否则会导致无法收到数据;
必须实现RKMODULE_GET_BT656_MBUS_INFO,BT656/BT1120都是调用这个ioctl,接口兼容,实现参考drivers/media/i2c/nvp6158_drv/nvp6158_v4l2.c
pinctrl需要引用对,以对bt656/bt1120相关gpio做相应iomux,否则会导致无法收到数据。
g_mbus_config接口示例代码如下:
static int lt8619c_g_mbus_config(struct v4l2_subdev *sd, unsigned int pad,
struct v4l2_mbus_config *cfg)
{
struct lt8619c *lt8619c = to_lt8619c(sd);
cfg->type = V4L2_MBUS_BT656;
if (lt8619c->clk_ddrmode_en) {
cfg->flags = RKMODULE_CAMERA_BT656_CHANNELS |
V4L2_MBUS_PCLK_SAMPLE_RISING |
V4L2_MBUS_PCLK_SAMPLE_FALLING;
} else {
cfg->flags = RKMODULE_CAMERA_BT656_CHANNELS |
V4L2_MBUS_PCLK_SAMPLE_RISING;
}
return 0;
}
querystd接口示例如下:
static int lt8619c_querystd(struct v4l2_subdev *sd, v4l2_std_id *std)
{
struct lt8619c *lt8619c = to_lt8619c(sd);
if (lt8619c->yuv_output_mode == BT656_OUTPUT)
*std = V4L2_STD_PAL;
else
*std = V4L2_STD_ATSC;
return 0;
}
dts配置参考如下:
&i2c2 {
status = "okay";
pinctrl-names = "default";
pinctrl-0 = <&i2c2m4_xfer>;
nvp6158: nvp6158@30 {
compatible = "nvp6158-v4l2";
status = "okay";
reg = <0x30>;
clocks = <&cru CLK_CIFOUT_OUT>;
clock-names = "xvclk";
power-domains = <&power RK3588_PD_VI>;
pinctrl-names = "default";
pinctrl-0 = <&cif_clk &cif_dvp_clk &cif_dvp_bus8 &cif_dvp_bus16>;
// pwr-gpios = <&gpio1 RK_PA6 GPIO_ACTIVE_HIGH>;
pwr2-gpios = <&gpio1 RK_PA5 GPIO_ACTIVE_HIGH>;
rst-gpios = <&gpio1 RK_PA3 GPIO_ACTIVE_HIGH>;
// rst2-gpios = <&gpio3 RK_PC1 GPIO_ACTIVE_HIGH>;
// pwdn-gpios = <&gpio1 RK_PA4 GPIO_ACTIVE_HIGH>;
// pwdn2-gpios = <&gpio4 RK_PA6 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "default";
rockchip,camera-module-lens-name = "default";
rockchip,dvp_mode = "BT1120"; //BT656 or BT1120 or BT656_TEST
rockchip,channel_nums = <4>; //channel nums, 1/2/4
rockchip,dual_edge = <1>; // pclk dual edge, 0/1
rockchip,default_rect= <1920 1080>; // default resolution
port {
nvp6158_out: endpoint {
remote-endpoint = <&dvp_in_bcam1>;
};
};
};
};
&rkcif {
status = "okay";
};
&rkcif_dvp {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
#address-cells = <1>;
#size-cells = <0>;
/* Parallel bus endpoint */
dvp_in_bcam1: endpoint@1 {
reg = <1>;
remote-endpoint = <&nvp6158_out>;
bus-width = <16>;
};
};
};
};
&rkcif_mmu {
status = "okay";
};
同样的,dts配置中,如果是YUV的sensor,则只需要上述配置,连接到rkcif_dvp节点即可,如果是RAW的sensor,则需要添加rkcif_dvp_sditf节点,并连接到rkisp_vir的节点。
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:4727次2024-02-26 13:58:45
-
浏览量:5494次2024-01-02 22:42:19
-
浏览量:4804次2023-12-25 13:49:55
-
浏览量:18967次2024-01-04 14:35:55
-
浏览量:3415次2023-12-25 13:44:26
-
浏览量:171次2026-03-27 15:27:34
-
浏览量:5388次2024-01-17 17:09:14
-
浏览量:5191次2022-05-11 09:11:45
-
浏览量:7484次2021-12-10 15:40:21
-
浏览量:10600次2022-10-17 11:49:55
-
浏览量:10177次2021-03-16 17:25:52
-
浏览量:7531次2023-12-25 14:11:19
-
浏览量:3434次2024-02-18 16:38:33
-
浏览量:14903次2022-09-28 13:51:28
-
浏览量:2412次2023-12-08 16:48:29
-
浏览量:12049次2022-09-27 10:22:54
-
浏览量:4459次2023-11-01 20:42:22
-
浏览量:7411次2023-12-28 17:46:27
-
浏览量:6069次2024-02-04 10:54:00
txp
暂无个性签名~




- rk3588 全景拼接
- 来自星星的GPU?第3代MIDgard架构RK3288性能直逼笔记本集显
- 【总经理报道】"价格不再敏感,瑞芯微6321高集成度有优势!"-专访安科讯总经理邱波
- 瑞芯微将在美国CES发布重磅消息!What's NEW @2015CES? 美好的时代 来了~
- 人脸识别速度提升50%,瑞芯微推出RV1126智能考勤/门禁/闸机产品方案
- 瑞芯微电力物联网整体解决方案应用解析
- 在rk3568移植rtl8723du,配置成wifi ap模式
- rv1126分步编译过程记录学习
- 6月 | 瑞芯微主题专栏征文活动,攻城狮快来攻占
- G126BP-IPC-38E(RV1126BP)快速适配——环境搭建
-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
txp

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
