

像章鱼一样触手可及:一个受生物学启发的模型打开了软体机器人控制的大门

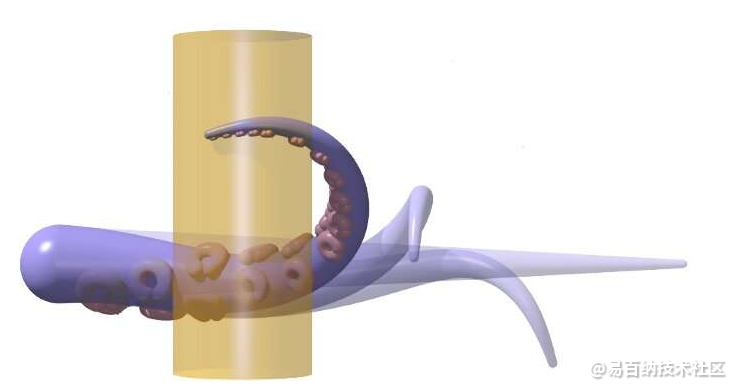
模拟章鱼抓住圆柱体
章鱼手臂协调几乎无限的自由度,以执行复杂的运动,如伸手、抓握、抓取、爬行和游泳。这些动物如何实现如此广泛的活动仍然是神秘,惊奇和灵感的来源。部分挑战来自内部肌肉的复杂组织和生物力学。
这个问题在伊利诺伊大学厄巴纳-香槟分校机械科学与工程教授Prashant Mehta和Mattia Gazzola领导的一个多学科项目中得到了解决。据《皇家学会会刊A》报道,这两位研究人员及其小组已经开发出一种生理上准确的章鱼手臂肌肉模型。“我们的模型是同类模型中的第一个,不仅提供了对生物问题的洞察力,而且为软机器人的设计和控制提供了框架,”Mehta说。
章鱼手臂令人印象深刻的功能长期以来一直是软机器人设计和控制的灵感来源。这种软机器人有可能在非结构化环境中执行复杂的任务,同时在人类周围安全地操作,应用范围从农业到手术。
该研究的主要作者,研究生Heng-Sheng Chang解释说,像章鱼手臂这样的软体系统提出了一个重大的建模和控制挑战。“它们由三个主要的内部肌肉群驱动 - 纵向,横向和倾斜 - 导致手臂以多种模式变形 - 剪切,伸展,弯曲和扭曲,”他说。“这赋予了柔软的肌肉手臂很大的自由度,不像僵硬的手臂。
该团队的关键见解是使用存储的能量函数来表达手臂肌肉组织,这是一个从连续介质力学理论借来的概念。博士后学者和通讯作者Udit Halder解释说:“手臂放在能量景观的最小值。肌肉驱动改变了储存的能量功能,从而改变了手臂的平衡位置并引导运动。
使用储存的能量解释肌肉极大地简化了手臂的控制设计。特别是,该研究概述了一种能量塑造控制方法,以计算解决伸手和抓握等操作任务所需的肌肉激活。当这种方法在软件环境Elastica中以数字方式演示时,当章鱼手臂在三维空间中模拟时,该模型导致了非常逼真的运动。此外,根据Halder的说法,“我们的工作提供了性能的数学保证,而这些保证通常缺乏替代方法,包括机器学习。
“我们的工作是伊利诺伊大学正在进行的更大合作生态系统的一部分,”梅塔说。“在上游,有生物学家在章鱼身上做实验。在下游,有机器人专家正在将这些数学思想应用到真正的软机器人身上。
Mehta和Gazzola的小组与伊利诺伊州分子和综合生理学名誉教授Rhanor Gillette合作,将观察到的章鱼生理学纳入本研究的数学模型中。未来的工作将讨论基于能量的控制的生物学影响。此外,研究人员正在与伊利诺伊州工业与企业系统工程教授Girish Krishnan合作,将他们的数学思想融入真正的软机器人设计和控制中。这不仅将创造一种控制软机器人的系统方式,而且还将提供对其工作机制的更深入理解。
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:1510次2023-02-15 15:42:15
-
浏览量:2023次2023-01-29 09:42:49
-
浏览量:1219次2023-10-08 10:00:08
-
浏览量:1335次2023-03-09 16:59:13
-
浏览量:1093次2023-10-07 10:21:44
-
浏览量:1444次2023-02-03 09:34:05
-
浏览量:1975次2019-01-22 16:58:22
-
浏览量:1333次2023-04-20 08:54:12
-
浏览量:1437次2023-04-23 09:46:58
-
浏览量:1342次2023-04-21 08:55:25
-
浏览量:1588次2023-04-23 09:44:59
-
浏览量:1848次2023-04-20 08:57:01
-
浏览量:1584次2023-04-21 08:46:56
-
浏览量:968次2023-07-19 16:06:32
-
浏览量:1013次2023-11-15 15:54:49
-
浏览量:1781次2023-03-20 15:51:34
-
2024-06-13 01:42:37
-
浏览量:2069次2018-08-12 09:42:16
-
浏览量:1956次2023-03-23 10:43:10






-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
艾

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
