


MOmo
3个粉丝
13
问答
9
专栏
5
资料
2089
- 收藏
- 点赞
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
运行cartographer建图时 rviz的小车和laser_link坐标系偏离?
学习ROS机器人开发实践 运行cartographer建图时 rviz的小车和laser_link坐标系偏离 如图所示 没有报错提醒 只有这个警告 已经困扰好几天了 求助大佬!!!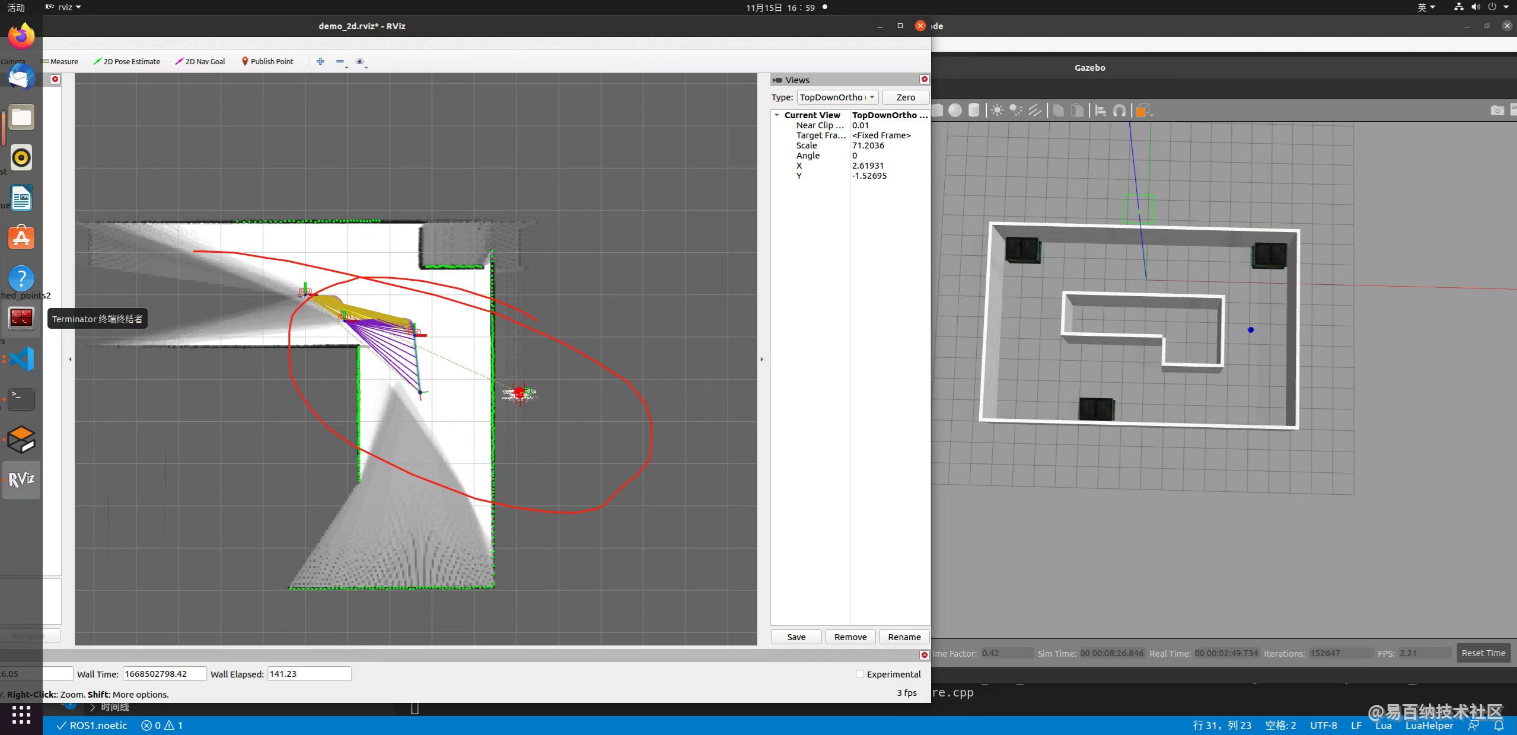
我来回答
回答2个
时间排序
认可量排序

 该回答已被题主采纳为最佳答案
该回答已被题主采纳为最佳答案
或将文件直接拖到这里
悬赏:
E币
网盘
* 网盘链接:
* 提取码:
悬赏:
E币
Markdown 语法
- 加粗**内容**
- 斜体*内容*
- 删除线~~内容~~
- 引用> 引用内容
- 代码`代码`
- 代码块```编程语言↵代码```
- 链接[链接标题](url)
- 无序列表- 内容
- 有序列表1. 内容
- 缩进内容
- 图片
相关问答
-
2023-04-23 10:43:35
-
2025-07-14 15:47:19
-
2018-11-17 11:13:09
-
2018-12-24 10:42:54
-
2021-02-01 15:22:36
-
2018-11-24 11:22:44
-
2025-07-13 20:45:33
-
2018-11-05 14:05:36
-
2018-12-11 11:03:17
-
2023-04-18 11:34:50
-
2018-10-23 09:12:27
-
2018-08-17 17:06:26
-
2018-09-06 15:19:55
-
2018-12-21 15:15:16
-
2019-01-08 10:53:52
-
2018-12-04 14:57:47
-
2018-12-10 10:29:48
-
2020-09-02 15:43:48
-
2018-12-29 13:51:04
无更多相似问答 去提问
点击登录
-- 积分
-- E币
提问
—
收益
—
被采纳
—
我要提问
切换马甲
上一页
下一页
悬赏问答
-
103616 3403 FPN标定黑斑问题
-
10isp图像算法原理有吗
-
33SS928自编译sample_vio 运行失败,MIPI lane 配置报错
-
10如何嵌入自己的图像处理程序
-
10T32crop和fcrop怎么从中间裁剪?
-
53516卡死问题
-
10hi3516cv610 去除风扇声音,人说话声音正常输出不变声
-
5hi3516cv610适配imx662的wdr模式出图图像不正常怎么去解决
-
5ss928 [sample_comm_venc_get_venc_stream_proc]-2627: get venc stream time out, exit thread
-
10要一份RK3576最新硬件资料包
举报反馈
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
提醒
你的问题还没有最佳答案,是否结题,结题后将扣除20%的悬赏金
取消
确认
提醒
你的问题还没有最佳答案,是否结题,结题后将根据回答情况扣除相应悬赏金(1回答=1E币)
取消
确认


关注公众号
联系我们
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
回顶部

{kind=link}