

技术专栏
估算图像间的投影关系

一、相机标定
1.实验
实验一:自动检测棋盘图案中的角点
源码示例
#include<iostream>
#include <opencv2/opencv.hpp>
#include<opencv2/core/core.hpp>
#include<opencv2/highgui/highgui.hpp>
#include <iomanip>
using namespace std;
using namespace cv;
int main(){
Mat image = cvLoadImage("chessboard.jpg");
//输出图像角点的vector
vector<Point2f>imageCorners;
//棋 牌中角点数目
Size boardSize(8, 11);
//获取棋 牌的角点
bool found = findChessboardCorners(image, boardSize, imageCorners);
//绘制角点
drawChessboardCorners(image, boardSize, imageCorners, found);//已经找到的角点
namedWindow("Corners on Chessboard");
imshow("Corners on Chessboard", image);
waitKey();
return 0;
}
实验结果: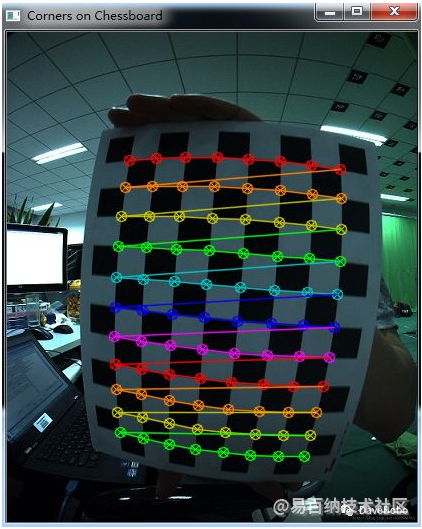
连接角点的直线展示了角点在向量中的顺序。
实验二:将棋盘图案去畸变得到正规的透视图像
源码示例
#include<iostream>
#include <opencv2/opencv.hpp>
#include<opencv2/core/core.hpp>
#include<opencv2/highgui/highgui.hpp>
#include <iomanip>
using namespace std;
using namespace cv;
class CameraCalibrator{
//输入点:
//位于世界坐标的点
vector<vector<Point3f>>objectPoints;
//像素坐标的点
vector<vector<Point2f>>imagePoints;
//输出矩阵
Mat cameraMatrix;
Mat distCoeffs;
//标定的方式
int flag;
//用于图像去畸变
Mat map1, map2;
bool mustInitUndistort;
public:
CameraCalibrator() :flag(0), mustInitUndistort(true){};
//打开棋盘图像并提取角点
int addChessboardPoints(const vector<string>&filelist, Size&boardSize);
//添加场景点与对应的图像点
void addPoints(const vector<Point2f>&imageCorners, const vector<Point3f>&objectPoints);
//进行标定,返回重投影误差(re-projection error)
double calibrate(Size&imageSize);
//标定后去除图像中的畸变
Mat remap(const Mat&image);
};
int CameraCalibrator::addChessboardPoints(const vector<string>&filelist, Size&boardSize){
//棋盘上的点的两种坐标
vector<Point2f> imageCorners;
vector<Point3f> objectCorners;
//3D场景中的点 在棋盘坐标系中初始化棋盘角点 这些点位于(x,y,z) = (i,j,0)
for (int i = 0; i < boardSize.height; i++)
{
for (int j = 0; j < boardSize.width; j++)
{
objectCorners.push_back(Point3f(i, j, 0.0f));
}
}
//2D图像中的点
Mat image;//为了保存棋盘图像
int success = 0;
//for all viewpoints
for (int i = 0; i < filelist.size(); i++)
{
//打开图像
image = imread(filelist[i],0);
//得到角点
bool found = findChessboardCorners(image,boardSize,imageCorners);
//获取亚像素精度
cornerSubPix(image, imageCorners,
Size(5, 5), Size(-1, -1),
TermCriteria(TermCriteria::MAX_ITER+TermCriteria::EPS,
30, //最大迭代数目
0.1)); //最小精度
//如果角点数目满足要求,那么将它加入数据
if (imageCorners.size()==boardSize.area())
{
//添加一个视角中的图像点及场景点
addPoints(imageCorners, objectCorners);
success++;
}
}
return success;
}
void CameraCalibrator::addPoints(const vector<Point2f>&imageCorners, const vector<Point3f>&objectCorners){
//2D图像点
imagePoints.push_back(imageCorners);
//对应3D场景中的点
objectPoints.push_back(objectCorners);
}
double CameraCalibrator::calibrate(Size&imageSize){
//必须重新进行去畸变
mustInitUndistort = true;
//输出旋转和平移
vector<Mat> rvecs, tvecs;
//开始标定
return calibrateCamera(objectPoints,//3D点
imagePoints, //图像点
imageSize, //图像尺寸
cameraMatrix, //输出的相机矩阵
distCoeffs, //输出的畸变矩阵
rvecs, tvecs, //旋转和平移
flag); //额外选项
}
Mat CameraCalibrator::remap(const Mat&image){
Mat undistorted;
if (mustInitUndistort)//每次标定只需要初始化一次
{
initUndistortRectifyMap(cameraMatrix, //计算得到的相机矩阵
distCoeffs, //计算得到的畸变矩阵
Mat(), //可选的rectification矩阵(此处为空)
Mat(), //用于生成undistorted对象的相机矩阵
image.size(), //undistorted对象的尺寸
CV_32FC1, //输出的映射图像的类型
map1, map2); //x坐标和y坐标映射函数
mustInitUndistort = false;
}
//应用映射函数
cv::remap(image, undistorted, map1, map2, INTER_LINEAR);//插值类型
return undistorted;
}
int main(){
CameraCalibrator Cc;
cv::Mat image;
std::vector<std::string> filelist;
cv::namedWindow("Image");
filelist.push_back("chessboard.jpg");
image = cv::imread(filelist[0]);
//相机标定
cv::Size boardSize(8,11);
Cc.addChessboardPoints(filelist, boardSize);
Cc.calibrate(image.size());
//去畸变
cv::Mat uImage = Cc.remap(image);
cv::imshow("原图像", image);
cv::imshow("去畸变", uImage);
cv::waitKey(0);
waitKey();
return 0;
}
标定过程:检测到一组角点后并将这些点添加到坐标点向量中—>计算标定参数—>通过一种数学公式表示畸变,构造合适的模型反转它以复原图像中的畸变。
原图像与透视图像
二、计算一对图像的基础矩阵
源码示例
#include<iostream>
#include<opencv2/core/core.hpp>
#include<opencv2/highgui/highgui.hpp>
#include<opencv2/features2d/features2d.hpp>
#include "opencv2/nonfree/nonfree.hpp"
#include<opencv2/legacy/legacy.hpp>
#include<imgproc/imgproc.hpp>
using namespace std;
using namespace cv;
int main(){
Mat image1 = cvLoadImage("church01.jpg");
Mat image2 = cvLoadImage("church03.jpg");
if (!image1.data || !image2.data)
return 0;
//特征点的向量
vector<KeyPoint> keypoints1, keypoints2;
//构造SURF特征检测器
SurfFeatureDetector surf(2500.); //阈值
//检测SURF特征
surf.detect(image1, keypoints1);
surf.detect(image2, keypoints2);
//构造SURF描述子提取器
SurfDescriptorExtractor surfDesc;
//提取SURF描述子
Mat descriptors1, descriptors2;
surfDesc.compute(image1, keypoints1, descriptors1);
surfDesc.compute(image2, keypoints2, descriptors2);
//构造匹配器
BruteForceMatcher<L2<float>> matcher;
//匹配两幅图像的描述子
vector<DMatch>matches;
matcher.match(descriptors1, descriptors2, matches);
nth_element(matches.begin(), //初始位置
matches.begin() + 7, //排序元素的位置
matches.end()); //终止位置
//移除第25位之后所有的元素
matches.erase(matches.begin() + 8, matches.end());
Mat imageMatches;
drawMatches(
image1, keypoints1, //第一幅图像及其特征点
image2, keypoints2, //第二幅图像及其特征点
matches, //匹配结果
imageMatches, //生成的图像
Scalar(255, 255, 255)); //直线的颜色
//转换KeyPoint类型到Point2f
vector<Point2f>selPoints1, selPoints2;
vector<int>pointIndexes1, pointIndexes2;
for (std::vector<cv::DMatch>::const_iterator it = matches.begin();
it != matches.end(); ++it)
{
// Get the indexes of the selected matched keypoints
pointIndexes1.push_back(it->queryIdx);
pointIndexes2.push_back(it->trainIdx);
}
KeyPoint::convert(keypoints1, selPoints1, pointIndexes1);
KeyPoint::convert(keypoints2, selPoints2, pointIndexes2);
//从7个矩阵中计算F矩阵
Mat fundemental = findFundamentalMat(
Mat(selPoints1), //图1中的点
Mat(selPoints2), //图2中的点
CV_FM_7POINT); //使用7个点的方法
//计算左图中点的极线 绘制在右图中 在右图中绘制对应的极线
vector<Vec3f> lines1;
computeCorrespondEpilines(
Mat(selPoints1), //图像点
1, //图1(也可以是2)
fundemental, //F矩阵
lines1); //一组极线
//对于所有极线
for (vector<Vec3f>::const_iterator it = lines1.begin(); it != lines1.end(); ++it)
{
//绘制第一列与最后一列之间的直线
line(image2,
Point(0, -(*it)[2] / (*it)[1]),
Point(image2.cols, -((*it)[2] + (*it)[0] * image2.cols) / (*it)[1]), Scalar(255, 255, 255));
}
namedWindow("Left Image Epilines");
imshow("Left Image Epilines", image2);
waitKey(0);
return 0;
}
实验效果
三、双视觉的极性约束匹配图像特征
实验
示例源码
#include<iostream>
#include<opencv2/core/core.hpp>
#include<opencv2/highgui/highgui.hpp>
#include<opencv2/features2d/features2d.hpp>
#include <opencv2/nonfree/nonfree.hpp>
#include<opencv2/legacy/legacy.hpp>
#include<imgproc/imgproc.hpp>
using namespace std;
using namespace cv;
class RobustMatcher{
private:
//指向特征检测器的智能指针
Ptr<FeatureDetector>detector;
//指向描述子提取器的智能指针
Ptr<DescriptorExtractor>extractor;
float ratio; //第一个以及第二个最近邻之间的最大比率
bool refineF; //是否改善F矩阵
double distance; //到极线的最小距离
double confidence; //置信等级(概率)
public:
RobustMatcher() :ratio(0.65f), refineF(true), confidence(0.99), distance(3.0){
//SURF为默认特征
detector = new SurfFeatureDetector();
extractor = new SurfDescriptorExtractor();
}
//设置特征检测器
void setFeatureDetector(Ptr<FeatureDetector>&detect){
detector = detect;
}
//设置描述子提取器
void setDescriptorExtractor(Ptr<DescriptorExtractor>&desc){
extractor = desc;
}
//设置最小距离极线RANSAC
void setMinDistanceToEpipolar(double d) {
distance = d;
}
//设置置信水平RANSAC
void setConfidenceLevel(double c) {
confidence = c;
}
void setRatio(float r) {
ratio = r;
}
void refineFundamental(bool flag) {
refineF = flag;
}
//使用对称性测试以及RANSAC匹配特征点
//返回基础矩阵
Mat match(Mat&image1,
Mat&image2, //输入图像
//输出匹配及特征点
vector<DMatch>&matches,
vector<KeyPoint>&keypoints1,
vector<KeyPoint>&keypoints2){
//1a测SURF特征
detector->detect(image1, keypoints1);
detector->detect(image2, keypoints2);
//1b取SURF描述子
Mat descriptions1, descriptions2;
extractor->compute(image1, keypoints1, descriptions1);
extractor->compute(image2, keypoints2, descriptions2);
//2.配两幅图像的描述子
//创建匹配器
BruteForceMatcher<L2<float>>matcher;
//从图1->图2的K最近邻(k=2)
vector<vector<DMatch>>matches1;
matcher.knnMatch(descriptions1,descriptions2,
matches1, //匹配结果的向量(每项有两个值)
2); //返回两个最近邻
//从图2->图1的k个最近邻(k=2)
vector<vector<DMatch>>matches2;
matcher.knnMatch(descriptions2, descriptions1,
matches2, //匹配结果的向量(每项有两个值)
2); //返回两个最近邻
//3.移除NN比率大于阈值的匹配
//清理图1->图2的匹配
int removed = ratioTest(matches1);
//清理图2->图1的匹配
removed = ratioTest(matches2);
//4.移除非对称的匹配
vector<DMatch>symMatches;
symmetryTest(matches1, matches2, symMatches);
//5.使用RANSAC进行最终验证
Mat fundemental = ransacTest(symMatches,keypoints1,keypoints2,matches);
//返回找到的基础矩阵
return fundemental;
}
//移除NN比率大于阈值的匹配 返回移除点的数目 对应的项被清零即尺寸将为0
int ratioTest(vector<vector<DMatch>>& matches) {
int removed = 0;
//遍历所有匹配
for (vector<vector<DMatch>>::iterator matchIterator = matches.begin();
matchIterator != matches.end(); ++matchIterator) {
// 如果识别两个最近邻
if (matchIterator->size() > 1) {
//检查距离比率
if ((*matchIterator)[0].distance / (*matchIterator)[1].distance > ratio) {
matchIterator->clear(); //移除匹配
removed++;
}
}
else { //不包含两个最近邻
matchIterator->clear(); //移除匹配
removed++;
}
}
return removed;
}
//在symMatches向量中插入对称匹配
void symmetryTest(const vector<vector<DMatch>>& matches1,
const vector<vector<DMatch>>& matches2,
vector<DMatch>& symMatches) {
// 遍历图1->图2的所有匹配
for (vector<vector<DMatch>>::const_iterator matchIterator1 = matches1.begin();
matchIterator1 != matches1.end(); ++matchIterator1) {
if (matchIterator1->size() < 2) //忽略被删除的匹配
continue;
//遍历图2->图1的所有匹配
for (vector<vector<DMatch>>::const_iterator matchIterator2 = matches2.begin();
matchIterator2 != matches2.end(); ++matchIterator2) {
if (matchIterator2->size() < 2) //忽略被删除的匹配
continue;
// 对称性测试
if ((*matchIterator1)[0].queryIdx == (*matchIterator2)[0].trainIdx &&
(*matchIterator2)[0].queryIdx == (*matchIterator1)[0].trainIdx) {
// 添加对称的匹配
symMatches.push_back(DMatch((*matchIterator1)[0].queryIdx,
(*matchIterator1)[0].trainIdx,
(*matchIterator1)[0].distance));
break; //图1->图2中的下一个匹配
}
}
}
}
// 基于RANSAC识别优质匹配
// 返回基础矩阵
Mat ransacTest(const vector<DMatch>& matches,
const vector<KeyPoint>& keypoints1,
const vector<KeyPoint>& keypoints2,
vector<DMatch>& outMatches) {
//转换KeyPoint类型到Point2f
vector<Point2f> points1, points2;
for (vector<DMatch>::const_iterator it = matches.begin();
it != matches.end(); ++it) {
// 得到左边特征点的坐标
float x = keypoints1[it->queryIdx].pt.x;
float y = keypoints1[it->queryIdx].pt.y;
points1.push_back(Point2f(x, y));
// 得到右边特征点的左边
x = keypoints2[it->trainIdx].pt.x;
y = keypoints2[it->trainIdx].pt.y;
points2.push_back(Point2f(x, y));
}
// 基于RANSAC计算F矩阵
vector<uchar> inliers(points1.size(), 0);
Mat fundemental = findFundamentalMat(
Mat(points1), Mat(points2), // 匹配点
inliers, // 匹配状态 (inlier 或 outlier)
CV_FM_RANSAC, // RANSAC 方法
distance, // 到极线的距离
confidence); // 置信概率
// 提取通过的匹配
vector<uchar>::const_iterator itIn = inliers.begin();
vector<DMatch>::const_iterator itM = matches.begin();
// 遍历所有匹配
for (; itIn != inliers.end(); ++itIn, ++itM) {
if (*itIn) { // 为有效匹配
outMatches.push_back(*itM);
}
}
if (refineF) {
// F矩阵将使用所有接受的匹配重新计算
// 转换keypoints 类型到 Point2f 准备计算最终的F矩阵
points1.clear();
points2.clear();
for (std::vector<DMatch>::const_iterator it = outMatches.begin();
it != outMatches.end(); ++it) {
// 得到左边特征点的坐标
float x = keypoints1[it->queryIdx].pt.x;
float y = keypoints1[it->queryIdx].pt.y;
points1.push_back(Point2f(x, y));
// 得到右边特征点的坐标
x = keypoints2[it->trainIdx].pt.x;
y = keypoints2[it->trainIdx].pt.y;
points2.push_back(Point2f(x, y));
}
// 从所有接受的匹配点中计算8点F
fundemental = findFundamentalMat(
Mat(points1), Mat(points2), // 匹配
CV_FM_8POINT); // 8点法
}
return fundemental;
}
};
int main(){
Mat image1 = imread("canal1.jpg",0);
Mat image2 = imread("canal2.jpg",0);
//准备匹配器
RobustMatcher rmatcher;
rmatcher.setConfidenceLevel(0.98);
rmatcher.setMinDistanceToEpipolar(1.0);
rmatcher.setRatio(0.65);
Ptr<FeatureDetector> pfd = new SurfFeatureDetector(10);
rmatcher.setFeatureDetector(pfd);
//匹配两幅图像
vector<DMatch>matches;
vector<KeyPoint>keypoints1, keypoints2;
Mat fundemental = rmatcher.match(image1, image2, matches, keypoints1, keypoints2);
// 画匹配图像
Mat imageMatches;
drawMatches(image1, keypoints1, // 第一幅图像及其特征点
image2, keypoints2, // 第二幅图像及其特征点
matches, // 匹配结果
imageMatches, // 生成的图像
Scalar(255, 255, 255)); // 直线的颜色
namedWindow("Matches");
imshow("Matches", imageMatches);
// 转换KeyPoint类型到Point2f
std::vector<Point2f> points1, points2;
for (std::vector<DMatch>::const_iterator it = matches.begin();
it != matches.end(); ++it) {
// 得到左边位置的特征点
float x = keypoints1[it->queryIdx].pt.x;
float y = keypoints1[it->queryIdx].pt.y;
points1.push_back(Point2f(x, y));
circle(image1, Point(x, y), 3, Scalar(255, 255, 255), 3);
// 得到右边位置的特征点
x = keypoints2[it->trainIdx].pt.x;
y = keypoints2[it->trainIdx].pt.y;
circle(image2, Point(x, y), 3, Scalar(255, 255, 255), 3);
points2.push_back(Point2f(x, y));
}
// 画极线
std::vector<Vec3f> lines1;
computeCorrespondEpilines(Mat(points1), 1, fundemental, lines1);
for (vector<Vec3f>::const_iterator it = lines1.begin();
it != lines1.end(); ++it) {
line(image2, Point(0, -(*it)[2] / (*it)[1]),
Point(image2.cols, -((*it)[2] + (*it)[0] * image2.cols) / (*it)[1]),
Scalar(255, 255, 255));
}
std::vector<Vec3f> lines2;
computeCorrespondEpilines(Mat(points2), 2, fundemental, lines2);
for (vector<Vec3f>::const_iterator it = lines2.begin();
it != lines2.end(); ++it) {
line(image1, Point(0, -(*it)[2] / (*it)[1]),
Point(image1.cols, -((*it)[2] + (*it)[0] * image1.cols) / (*it)[1]),
Scalar(255, 255, 255));
}
// 显示带有极线约束图片
namedWindow("Right Image Epilines (RANSAC)");
imshow("Right Image Epilines (RANSAC)", image1);
namedWindow("Left Image Epilines (RANSAC)");
imshow("Left Image Epilines (RANSAC)", image2);
waitKey();
return 0;
}
运行结果
匹配的特征点

四、两幅图之间的单应矩阵
源码示例
int main()
{
//读取图像
cv::Mat image1 = cv::imread("parliament1.bmp", 0);
cv::Mat image2 = cv::imread("parliament2.bmp", 0);
if (!image1.data || !image2.data)
return 0;
//准备匹配器
RobustMatcher rmatcher;
rmatcher.setConfidenceLevel(0.98);
rmatcher.setMinDistanceToEpipolar(1.0);
rmatcher.setRatio(0.65f);
cv::Ptr<cv::FeatureDetector> pfd = new cv::SurfFeatureDetector(10);
rmatcher.setFeatureDetector(pfd);
//匹配两幅图像
std::vector<cv::DMatch> matches;
std::vector<cv::KeyPoint> keypoints1, keypoints2;
cv::Mat fundemental = rmatcher.match(image1, image2, matches, keypoints1, keypoints2);
// 画匹配图像
cv::Mat imageMatches;
cv::drawMatches(image1, keypoints1, // 第一幅图像及其特征点
image2, keypoints2, // 第二幅图像及其特征点
matches, // 匹配结果
imageMatches, // 生成的图像
cv::Scalar(255, 255, 255)); // 直线的颜色
cv::namedWindow("Matches");
cv::imshow("Matches", imageMatches);
// 转换KeyPoint类型到Point2f
std::vector<cv::Point2f> points1, points2;
for (std::vector<cv::DMatch>::const_iterator it = matches.begin();
it != matches.end(); ++it) {
// 得到左边位置的特征点
float x = keypoints1[it->queryIdx].pt.x;
float y = keypoints1[it->queryIdx].pt.y;
points1.push_back(cv::Point2f(x, y));
// 得到右边位置的特征点
x = keypoints2[it->trainIdx].pt.x;
y = keypoints2[it->trainIdx].pt.y;
points2.push_back(cv::Point2f(x, y));
}
//找到两个图之间的单应矩阵
std::vector<uchar> inliers(points1.size(), 0);
cv::Mat homography = cv::findHomography(
cv::Mat(points1), cv::Mat(points2), // 对应的点集
inliers, // 输出的正确值
CV_RANSAC, // RANSAC 算法
1.); // 到反投影点的最大距离
// 绘制inlier点
std::vector<cv::Point2f>::const_iterator itPts = points1.begin();
std::vector<uchar>::const_iterator itIn = inliers.begin();
while (itPts != points1.end()) {
// 在每个inlier位置画圆
if (*itIn)
cv::circle(image1, *itPts, 3, cv::Scalar(255, 255, 255), 2);
++itPts;
++itIn;
}
itPts = points2.begin();
itIn = inliers.begin();
while (itPts != points2.end()) {
// 在每个inlier位置画圆
if (*itIn)
cv::circle(image2, *itPts, 3, cv::Scalar(255, 255, 255), 2);
++itPts;
++itIn;
}
cv::namedWindow("Image 1 Homography Points");
cv::imshow("Image 1 Homography Points", image1);
cv::namedWindow("Image 2 Homography Points");
cv::imshow("Image 2 Homography Points", image2);
// 歪曲image1 到 image2
cv::Mat result;
cv::warpPerspective(image1, // 输入
result, // 输出
homography, // homography
cv::Size(2 * image1.cols, image1.rows)); // 输出图像的尺寸
// 赋值图1到整幅图像的前半部分
cv::Mat half(result, cv::Rect(0, 0, image2.cols, image2.rows));
image2.copyTo(half);//复制图2到图1的ROI区域
cv::namedWindow("After warping");
cv::imshow("After warping", result);
cv::waitKey();
return 0;
}
运行效果
声明:本文内容由易百纳平台入驻作者撰写,文章观点仅代表作者本人,不代表易百纳立场。如有内容侵权或者其他问题,请联系本站进行删除。
红包
点赞
收藏
评论
打赏
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
评论
0个
手气红包
 暂无数据
暂无数据相关专栏
-
浏览量:3054次2020-08-04 20:26:22
-
浏览量:2784次2018-02-09 15:30:38
-
浏览量:4785次2020-08-26 19:06:10
-
浏览量:1202次2024-01-16 14:25:50
-
浏览量:10553次2020-12-10 17:08:30
-
浏览量:1880次2019-11-28 16:24:55
-
浏览量:3017次2022-01-30 09:00:13
-
浏览量:1528次2023-06-03 16:03:18
-
浏览量:4682次2019-11-19 14:49:26
-
浏览量:1932次2017-12-29 17:30:21
-
浏览量:1293次2023-06-03 15:58:59
-
浏览量:1849次2023-06-02 17:41:25
-
浏览量:4971次2021-01-08 01:04:31
-
浏览量:10424次2021-02-23 16:44:17
-
浏览量:1687次2023-06-12 14:17:54
-
浏览量:2847次2018-01-16 12:16:42
-
浏览量:2387次2019-12-07 14:09:38
-
浏览量:3626次2023-04-03 14:21:54
-
浏览量:6508次2020-09-25 10:53:20




置顶时间设置
结束时间
删除原因
-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
打赏作者
不会编程的老王
您的支持将鼓励我继续创作!
打赏金额:
¥1
¥5
¥10
¥50
¥100
支付方式:
 微信支付
微信支付
举报反馈
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
发布时间设置
发布时间:
请选择发布时间设置
是否关联周任务-专栏模块
审核失败
失败原因
请选择失败原因
备注
请输入备注



关注公众号
联系我们
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
回顶部
