

RK3568-采用SSD模型实现USB摄像头实时AI物品识别

RK3568具有1TOPS算力的NPU,可以在板子上进行AI计算。飞凌OK3568板子资料中自带了一些AI识别的例子,但只是对一张图片进行识别,且需要单独使用图片查看工具查看识别结果。
为了更直观的体验RK3568的AI算力,将AI识别例程与摄像头功能结合起来,对摄像头的每一帧图像进行物品识别,这里使用的是RK提供的SSD模型。
演示视频:
RK3568-AI物品检测
1 SSD模型介绍
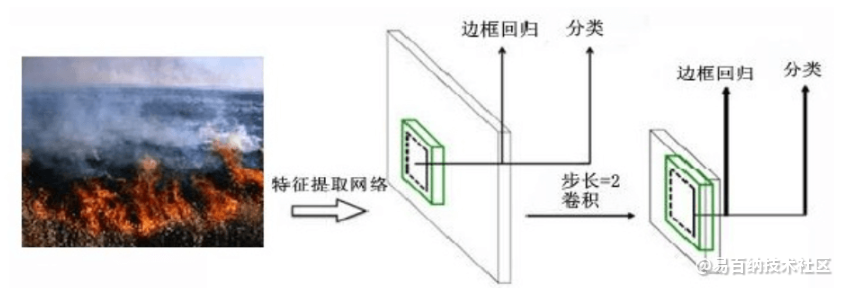
SSD,全称为Single Shot MultiBox Detector,是Wei Liu在ECCV 2016上提出的一种目标检测算法,属于一阶段One Stage方法,SSD 模型利用不同尺度的特征图进行目标的检测,其模型结构图如下:
SSD具有如下主要特点:
- 从YOLO中继承了将detection转化为regression的思路,同时一次即可完成网络训练
- 基于Faster RCNN中的anchor,提出了相似的prior box
- 加入基于特征金字塔(Pyramidal Feature Hierarchy)的检测方式,相当于半个FPN思路
SSD网络结构图如下:
其算法步骤为:
- 将图像输入预训练好的分类网络(基于VGG16-Atrous)得到不同大小的特征映射
- 分别提取Conv4_3、Conv7、Conv8_2、Conv9_2、Conv10_2、Conv11_2层的特征映射feature map,在每个特征映射的每个点构造6个不同大小尺度的bounding box,进行检测和分类来生成一些列bounding box
- 采用NMS处理不同特征映射的bounding box,删掉部分重叠或者不正确的bounding box,得到最终的检测框
OK3568-C开发板中自带了已训练好的AI模型,位于/userdata/model目录下的ssd_inception_v2.rknn,我们直接用就可以了。
2 USB摄像头实现物品识别代码
先来看下整个代码的项目结构,然后再来分别介绍各个功能模块。
- imageutil.h:图像类型转换相关函数
- myvideosourceface.cpp/h:用于USB摄像头图像显示
- qtcamera.cpp/h:qt界面
- rknn_ssd_process.cpp/h:用于SSD模型进行AI物品识别的接口函数
- rknn_ssd.cpp/h:SSD模型相关函数
3 按帧获取USB摄像头图像
Qt读取并显示USB摄像头,需要3个基本元素:
- QCamera:它是用于读取摄像头视频信号的接口函数
- QCameraInfo:它提供相机设备的常规信息,可以用来查询系统上当前可用的相机设备
- QCameraViewfinder:它提供了一个相机取景器的小部,该类继承于QVideoWidget类,用于显示多媒体类提供的视频
3.1 USB相机获取图像
查找USB相机
//可用相机列表
const QList<QCameraInfo> availableCameras = QCameraInfo::availableCameras();
for (const QCameraInfo &cameraInfo : availableCameras)
{
qDebug() << cameraInfo.description();
if (cameraInfo.description().contains("USB", Qt::CaseSensitive))
{
//USB摄像头
QPushButton *camera = new QPushButton;
camera->setText(cameraInfo.description());
camera->setFont(font);
camera->setCheckable(true);
if (cameraInfo == QCameraInfo::defaultCamera())
{
camera->setDefault(true);
}
else
{
camera->setDefault(false);
}
//启动相机
connect(camera, SIGNAL(clicked(bool)), this, SLOT(on_cameraClick()));
vLayout->addWidget(camera);
m_cameraInfo = cameraInfo;
break;
}
}
启动相机与显示
//创建摄像头对象
m_camera = new QCamera(m_cameraInfo);
//创建取景器
m_viewfinder = new QCameraViewfinder();
//配置摄像头的模式--捕获静止图像
QCamera::CaptureModes captureMode = QCamera::CaptureStillImage;
if (m_camera->isCaptureModeSupported(captureMode))
{
m_camera->unload();
m_camera->setCaptureMode(captureMode);
//设置取景器显示
m_camera->setViewfinder(m_viewfinder);
//启动摄像头
m_camera->start();
}
3.2 改为自己的Viewfinder
上面的USB摄像头显示程序,使用的是Qt的QCameraViewfinder用来显示摄像头图像,为了能获取到每一帧的图像,可以自己实现一个Viewfinder,然后在m_camera->setViewfinder时设置为自己的,并添加槽函数rcvFrame,当获取到一帧图像时,会触发此函数。
void qtCamera::on_cameraClick()
{
//创建摄像头对象
m_camera = new QCamera(m_cameraInfo);
m_camera->unload();
//配置摄像头的模式--捕获静止图像
m_camera->setCaptureMode(QCamera::CaptureStillImage);
//设置默认摄像头参数
QCameraViewfinderSettings set;
set.setResolution(640, 480); //设置显示分辨率
set.setMaximumFrameRate(25); //设置帧率
//自己用QPainter将每一帧视频画出来
myvideosurface *surface = new myvideosurface(this);
//设置取景器显示
m_camera->setViewfinder(surface);
connect(surface, SIGNAL(frameAvailable(QVideoFrame)), this, SLOT(rcvFrame(QVideoFrame)), Qt::DirectConnection);
connect(this,SIGNAL(sendOneQImage(QImage)), this, SLOT(recvOneQImage(QImage)));
//启动摄像头
m_camera->start();
}
接收到一帧图像后,其原始图像格式是QVideoFrame类型的,需要先转为QImage类型,然后就可以进行显示或进行图像处理了,这里触发一个sendOneQImage信号来通知进行图像处理:
void qtCamera::rcvFrame(QVideoFrame m_currentFrame)
{
m_currentFrame.map(QAbstractVideoBuffer::ReadOnly);
QImage videoImg = QImage(m_currentFrame.bits(),
m_currentFrame.width(),
m_currentFrame.height(),
QVideoFrame::imageFormatFromPixelFormat(m_currentFrame.pixelFormat())).copy();
m_currentFrame.unmap();
QWidget::update();
emit sendOneQImage(videoImg); //发送信号
}
4 图像类型的转换与显示
4.1 QImage转Mat
Qt是QCamera创建的USB摄像头,获取到的图片格式是QImage类型,而使用OpenCV进行图像处理,需要转换为cv::Mat类型,转换的方式如下:
cv::Mat QImageToMat(QImage image)
{
image = image.convertToFormat(QImage::Format_RGB888);
cv::Mat tmp(image.height(), image.width(), CV_8UC3, (uchar *)image.bits(), image.bytesPerLine());
cv::Mat result; // deep copy just in case (my lack of knowledge with open cv)
cvtColor(tmp, result, CV_BGR2RGB);
return result;
}
4.2 Mat转QImage
OpenCV进行图像处理完成后,比如进行AI物品识别完成,并将识别的信息标记到图像上后,需要再转成QImage的类型用于在Qt中显示出来,转换的方式如下:
QImage MatToQImage(cv::Mat mat)
{
cv::cvtColor(mat, mat, CV_BGR2RGB);
QImage qim((const unsigned char *)mat.data, mat.cols, mat.rows, mat.step,
QImage::Format_RGB888);
return qim;
}
4.3 QImage转QPixmap
QImage在Qt中还不能直接显示出来,还需要再转为QPixmap类型,转换的方式如下:
QImage qImage;
QPixmap tempPixmap = QPixmap::fromImage(qImage);
4.4 图像的显示
这里创建一个QLabel用于显示图像,调用setPixmap方法即可将图像显示出来,最后的adjustSize用来自动调整大小。
//创建一个label用于显示图像
m_lableShowImg = new QLabel();
m_lableShowImg->setPixmap(tempPixmap);
m_lableShowImg->adjustSize();
5 RKNN例程移植
飞凌OK3568-C开发板资料中,自带了ssd模型的测试程序,代码位置如下,ssd的测试代码是这3个文件:

测试代码,需要在执行时,输入模型的目录位置和测试图片的位置,AI物品识别之后会产生一个输出图片,需要再使用图片查看器查看结果。
为了方便功能的调用,这里将fltest_opencv_rknn_ssd_main.cc改写为rknn_ssd_process.cpp,并将具体功能进行拆分,封装为C++的形式。
5.1 按功能封装为C++形式
自己封装的RknnSsdModel类定义:
class RknnSsdModel
{
public:
RknnSsdModel(){};
~RknnSsdModel(){};
int RknnInit(const char *model_path);
int RknnDeInit();
unsigned char *LoadModel(const char *filename, int *model_size);
int DoRknnSsd(cv::Mat &src, cv::Mat &res);
private:
unsigned char *m_pModel = nullptr;
rknn_context m_rknnCtx;
rknn_input_output_num m_rknnIoNum;
};
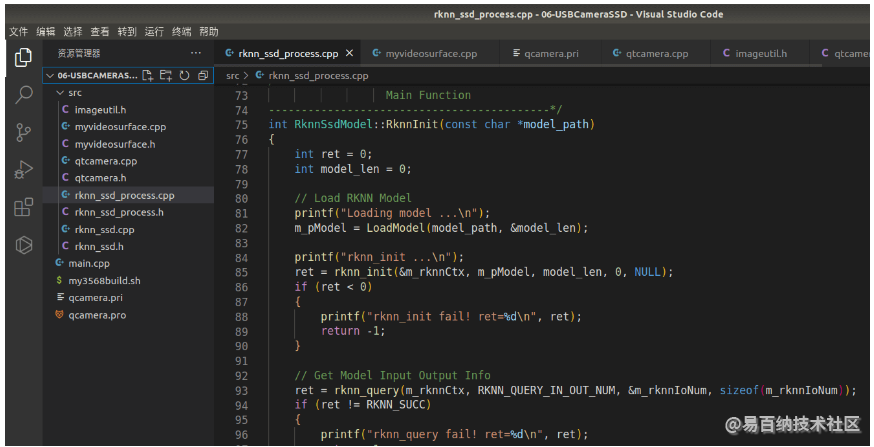
5.1.1 RKNN初始化
主要功能是根据传入的rknn模型进行相关的初始化
int RknnSsdModel::RknnInit(const char *model_path)
{
int ret = 0;
int model_len = 0;
// Load RKNN Model
printf("Loading model ...\n");
m_pModel = LoadModel(model_path, &model_len);
printf("rknn_init ...\n");
ret = rknn_init(&m_rknnCtx, m_pModel, model_len, 0, NULL);
if (ret < 0)
{
printf("rknn_init fail! ret=%d\n", ret);
return -1;
}
//省略...
}
5.1.2 RKNN运行
传入一张Mat格式的图片(一帧视频图像),经过AI识别,并将识别的信息标注到图片上后,将识别结果也以Mat格式传出:
int RknnSsdModel::DoRknnSsd(cv::Mat &src, cv::Mat &res)
{
const int img_width = 300;
const int img_height = 300;
const int img_channels = 3;
int ret = 0;
cv::Mat img = src.clone();
if (src.cols != img_width || src.rows != img_height)
{
printf("resize %d %d to %d %d\n", src.cols, src.rows, img_width, img_height);
cv::resize(src, img, cv::Size(img_width, img_height), (0, 0), (0, 0), cv::INTER_LINEAR);
}
// Set Input Data
rknn_input inputs[1];
memset(inputs, 0, sizeof(inputs));
inputs[0].index = 0;
inputs[0].type = RKNN_TENSOR_UINT8;
inputs[0].size = img.cols * img.rows * img.channels();
inputs[0].fmt = RKNN_TENSOR_NHWC;
inputs[0].buf = img.data;
ret = rknn_inputs_set(m_rknnCtx, m_rknnIoNum.n_input, inputs);
if (ret < 0)
{
printf("rknn_input_set fail! ret=%d\n", ret);
return -1;
}
// Run
printf("rknn_run\n");
ret = rknn_run(m_rknnCtx, nullptr);
if (ret < 0)
{
printf("rknn_run fail! ret=%d\n", ret);
return -1;
}
// Get Output
rknn_output outputs[2];
memset(outputs, 0, sizeof(outputs));
outputs[0].want_float = 1;
outputs[1].want_float = 1;
ret = rknn_outputs_get(m_rknnCtx, m_rknnIoNum.n_output, outputs, NULL);
if (ret < 0)
{
printf("rknn_outputs_get fail! ret=%d\n", ret);
return -1;
}
// Post Process
detect_result_group_t detect_result_group;
postProcessSSD((float *)(outputs[0].buf), (float *)(outputs[1].buf), src.cols, src.rows, &detect_result_group);
// Release rknn_outputs
rknn_outputs_release(m_rknnCtx, 2, outputs);
// Draw Objects
for (int i = 0; i < detect_result_group.count; i++)
{
detect_result_t *det_result = &(detect_result_group.results[i]);
printf("%s @ (%d %d %d %d) %f\n",
det_result->name,
det_result->box.left, det_result->box.top, det_result->box.right, det_result->box.bottom,
det_result->prop);
int x1 = det_result->box.left;
int y1 = det_result->box.top;
int x2 = det_result->box.right;
int y2 = det_result->box.bottom;
rectangle(src, Point(x1, y1), Point(x2, y2), Scalar(255, 0, 0, 255), 3);
putText(src, det_result->name, Point(x1, y1 - 12), 1, 4, Scalar(0, 255, 0, 255), 4);
}
res = src;
return 0;
}
5.2 AI识别调用
OK3568-C开发板中自带了已训练好的AI模型,位于/userdata/model目录下的ssd_inception_v2.rknn,在程序初始化时需要用到。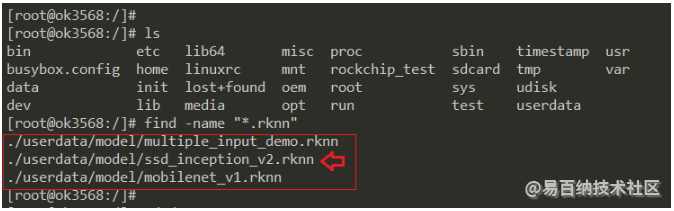
AI识别的代码逻辑为:先在qtCamera初始化时调用RKNN的初始化,然后打开USB摄像头,USB获取到每帧图像后, 调用DoRknnSsd进行AI物品识别,最后将识别的结果通过setPixmap方法展示出来
//先在qtCamera初始化时调用RKNN的初始化
std::string ssd_model = "/userdata/model/ssd_inception_v2.rknn";
m_rknnModel.RknnInit(ssd_model.c_str());
//USB获取到每帧图像后, 调用DoRknnSsd进行AI物品识别
void qtCamera::recvOneQImage(QImage qImage)
{
cv::Mat srcImg = ImageUtil::QImageToMat(qImage);
cv::Mat dstImg;
m_rknnModel.DoRknnSsd(srcImg, dstImg);
QImage qDstImage = ImageUtil::MatToQImage(dstImg);
QPixmap tempPixmap = QPixmap::fromImage(qDstImage);
m_lableShowImg->setPixmap(tempPixmap);
m_lableShowImg->adjustSize();
}
5.3 编译
需要注意下Qt工程的配置文件,要把opencv的一些库链接进去
qcamera.pri
INCLUDEPATH += $$PWD/src
HEADERS += \
$$PWD/src/qtcamera.h \
$$PWD/src/myvideosurface.h \
$$PWD/src/rknn_ssd.h \
$$PWD/src/rknn_ssd_process.h \
$$PWD/src/imageutil.h
SOURCES += \
$$PWD/src/qtcamera.cpp \
$$PWD/src/myvideosurface.cpp \
$$PWD/src/rknn_ssd.cpp \
$$PWD/src/rknn_ssd_process.cpp
qcamera.pro
TARGET = USBCameraSSD
TEMPLATE = app
QT += widgets multimedia multimediawidgets
SOURCES += main.cpp
include($$PWD/qcamera.pri)
LIBS+=-lopencv_core -lopencv_objdetect -lopencv_highgui -lopencv_videoio -lopencv_imgproc -lopencv_imgcodecs -lrknn_api -lOpenCL -lpthread
#temp file
DESTDIR = $$PWD/app_bin
MOC_DIR = $$PWD/build/qcamera
OBJECTS_DIR = $$PWD/build/qcamera
最后的编译脚本还和之前的一样:
#! /bin/bash
mkdir -p build
cd build
export PATH=/home/xxpcb/myTest/OK3568/sourcecode/OK3568-linux-source/buildroot/output/OK3568/host/bin:$PATH
qmake .. && make
6 总结
本篇介绍了在飞凌OK3568-C开发板中,外接USB摄像头,利用Qt和RKNN进行AI物品识别,通过已训练好的SSD模型,进行摄像头画面的实时AI物品检查的代码实现原理。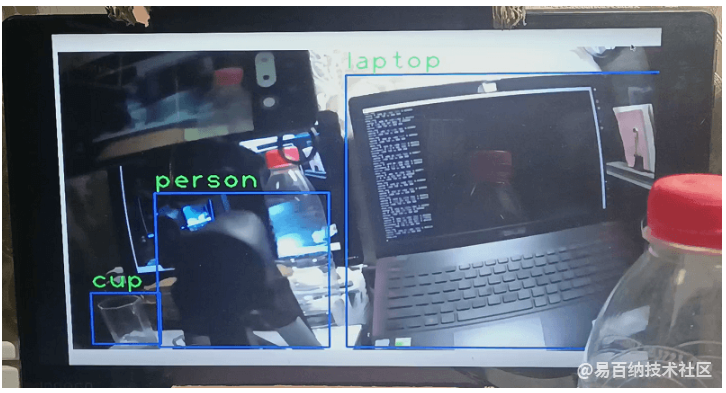
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:3726次2023-06-28 17:22:40
-
浏览量:4874次2021-04-02 09:47:41
-
浏览量:6317次2022-07-13 15:47:15
-
浏览量:36056次2022-06-11 11:06:24
-
浏览量:10601次2022-10-17 11:49:55
-
浏览量:1979次2025-01-24 15:23:10
-
浏览量:2736次2023-04-17 16:03:03
-
浏览量:4310次2023-06-26 08:57:07
-
浏览量:3827次2022-10-28 09:28:29
-
浏览量:2699次2022-11-23 16:19:38
-
浏览量:5507次2024-01-02 22:42:19
-
浏览量:4455次2022-09-03 09:03:36
-
浏览量:3993次2021-06-12 17:32:52
-
浏览量:1554次2024-02-04 09:47:59
-
浏览量:1964次2023-12-26 18:03:31
-
浏览量:3189次2018-02-22 15:06:20
-
浏览量:11559次2022-10-12 09:28:15
-
浏览量:2786次2020-04-01 10:07:10
-
浏览量:4142次2021-06-15 09:44:15






-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖

技术不加糖

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
