

AX620A运行yolov5s自训练模型全过程记录(windows)

文章目录
前言
上一篇文章《ubuntu22.04搭建AX620A官方例程开发环境》记录了AX620A开发环境的搭建,这段时间板子终于到手了,尝试了一下怎么跑自己训练的yolov5模型,将整个过程记录一下。
一、搭建模型转换环境(使用GPU加速)
模型转换工具名称叫做Pulsar工具链,官方提供了docker容器环境。因为我十分懒得装一台ubuntu实体机,所以一切操作都想办法在windows下实现的~~~
1.安装Windows平台的Docker-Desktop客户端
下载地址:点这里
无脑安装就行了,没有什么特别操作
安装好后,打开Docker-Desktop,程序会初始化和启动,然后就可以打开cmd输入命令拉取工具链镜像了
docker pull sipeed/pulsar
2.下载镜像成功后,应该能在Docker-Desktop的images列表中看到了
3.原本到这里就可以直接启动容器来转换模型了,不过突然看到工具链是支持gpu加速的,但镜像里面没有安装相应的cuda环境,所以这里就要一番折腾了。
思路是:安装WSL2——安装ubuntu子系统——子系统内安装nVidia CUDA toolkit——再安装nvidia-docker。这一番操作后,以后在windows cmd下启动的容器(需加上“—gpus all”参数),就都带上完整的cuda环境了。
- 使用WSL2安装ubuntu20.04
恕我一直孤陋寡闻,直到这时才知道原来windows下有这么个方便的东西,以前一直只会装虚拟机…
WSL2具体怎么开启百度一下,反正我的win10更新到最新版本操作没遇到什么问题。
(1) 查看windows平台可支持的linux子系统列表
wsl --list --online
以下是可安装的有效分发的列表。
请使用“wsl --install -d <分发>”安装。
NAME FRIENDLY NAME
Ubuntu Ubuntu
Debian Debian GNU/Linux
kali-linux Kali Linux Rolling
openSUSE-42 openSUSE Leap 42
SLES-12 SUSE Linux Enterprise Server v12
Ubuntu-16.04 Ubuntu 16.04 LTS
Ubuntu-18.04 Ubuntu 18.04 LTS
Ubuntu-20.04 Ubuntu 20.04 LTS
(2) 设置每个安装的发行版默认用WSL2启动
$ wsl --set-default-version 2
(3) 安装Ubuntu20.04
$ wsl --install -d Ubuntu-20.04
(4) 设置默认子系统为Ubuntu20.04
$ wsl --setdefault Ubuntu-20.04
(5) 查看子系统信息,星号为缺省系统
$ wsl -l -v
NAME STATE VERSION
* Ubuntu-20.04 Stopped 2
docker-desktop-data Running 2
docker-desktop Running 2
- ubuntu22.04下安装cuda
以下操作均在windows的子系统ubuntu终端输入,逐条执行
wget https://developer.download.nvidia.com/compute/cuda/repos/wsl-ubuntu/x86_64/cuda-wsl-ubuntu.pin
sudo mv cuda-wsl-ubuntu.pin /etc/apt/preferences.d/cuda-repository-pin-600
wget https://developer.download.nvidia.com/compute/cuda/11.7.0/local_installers/cuda-repo-wsl-ubuntu-11-7-local_11.7.0-1_amd64.deb
sudo dpkg -i cuda-repo-wsl-ubuntu-11-7-local_11.7.0-1_amd64.deb
sudo cp /var/cuda-repo-wsl-ubuntu-11-7-local/cuda-B81839D3-keyring.gpg /usr/share/keyrings/
sudo apt-get update
sudo apt-get -y install cuda
- ubuntu22.04下安装nvidia-docker
distribution=$(. /etc/os-release;echo $ID$VERSION_ID)
curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | sudo apt-key add -
curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list | sudo tee
/etc/apt/sources.list.d/nvidia-docker.list
sudo apt-get update
sudo apt-get install -y nvidia-docker2
至此,cuda的相关环境就安装好了,可以在ubuntu的终端下输入:nvidia-smi确认显卡是否有识别到
- 启动容器
在windows的cmd终端中,输入以下命令来启动pulsar容器docker run -it --net host --gpus all --shm-size 12g -v D:\ax620_data:/data sipeed/pulsar --name ax620--gpus all要加上,容器才能使用gpu。--shm-size 12g指定容器使用内存,根据你实际内存大小来确定。我这个数值转换yolov5s的模型没有问题。--name ax620指定容器名称,以后在cmd下输入:docker start ax620 && docker attach ax620就可以方便进入容器环境内。D:\ax620_data:/data将本地硬盘指定路径映射到容器的/data目录。这个文件夹需要存放模型转换用到的工程,可以到这里下载
二、转换yolov5自训练模型
1.yolov5使用的是最新的V6.2版,按照标准流程训练出来pt模型文件后,使用export.py导出为onnx格式
python export.py --weights yourModel.pt --simplify --include onnx
2.要将onnx三个输出层的后处理去掉,因为这部分的处理将在ax620程序里面实现处理。可参考这位大哥的文章《爱芯元智AX620A部署yolov5 6.0模型实录》。具体处理的python代码如下:
import onnx
input_path = r"D:\ax620_data\model\yourModel.onnx"
output_path = r"D:\ax620_data\model\yourModel_rip.onnx"
input_names = ["images"]
output_names = ["onnx::Reshape_326","onnx::Reshape_364","onnx::Reshape_402"]
onnx.utils.extract_model(input_path, output_path, input_names, output_names)
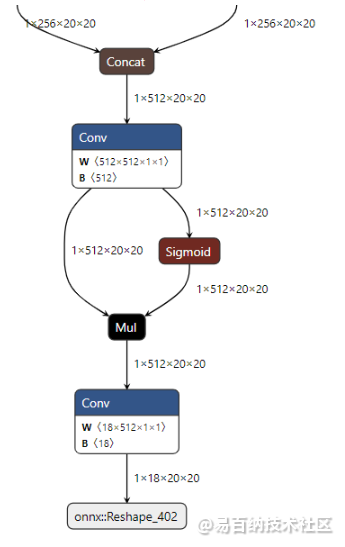
注意这里的三个层的名称Reshape_326、Reshape_364、Reshape_402可能和你的模型里面是不一样的,具体使用netron工具来确认。得到了以下结尾的模型。注:我这里最后的一个输出形状是1x18x20x20,因为我的模型只有一个识别种类(4+1+1)* 3 = 18
3.去到pulsar容器环境进行模型转换,onnx->joint,输入
pulsar build --input model/yourModel_rip.onnx --output model/yourModel.joint --config config/yolov5s.prototxt --output_config config/output_config.prototxt
其中:
yolov5s.prototxt这个配置文件需要到爱芯元智的百度网盘下载:到这里下载
随机选取1000张你训练集的图片,打包成coco_1000.tar,放到容器/data/dataset目录内,作为量化校准用
模型转换比较慢。即使用到了gpu加速,也需要好几分钟。最后将在容器的/data/model目录下生成你的joint模型文件
模型仿真与对分。测试模型转换后与原来onnx的精度差别。可以看出三个输出的余弦相似度都很高,精度误差很小。
pulsar run model/yourModel_rip.onnx model/yourModel.joint --input images/test.jpg --config config/output_config.prototxt
--output_gt gt/
...(运行过程省略)
[<frozen super_pulsar.func_wrappers.pulsar_run.compare>:82] Score compare table:
------------------------ ---------------- ------------------
Layer: onnx::Reshape_326 2-norm RE: 4.08% cosine-sim: 0.9994
Layer: onnx::Reshape_364 2-norm RE: 4.49% cosine-sim: 0.9991
Layer: onnx::Reshape_402 2-norm RE: 6.77% cosine-sim: 0.9981
------------------------ ---------------- ------------------
三、板上测试
通过AXERA-TECH/ax-samples 仓库构建自己的测试程序。
因为是自训练模型,我的模型只有1个类别,官方的yolov5测试程序是使用coco数据集的80分类的,需要做一点调整。
- 在examples目录下,复制
ax_yolov5s_steps.cc另存为ax_yolov5s_my.cc 修改
ax-samples/examples/base/detection.hpp,新增一个generate_proposals_n函数,cls_num就是模型类别数static void generate_proposals_n(int cls_num, int stride, const float* feat, float prob_threshold, std::vector<Object>& objects, int letterbox_cols, int letterbox_rows, const float* anchors, float prob_threshold_unsigmoid) { int anchor_num = 3; int feat_w = letterbox_cols / stride; int feat_h = letterbox_rows / stride; // int cls_num = 80; int anchor_group; if (stride == 8) anchor_group = 1; if (stride == 16) anchor_group = 2; if (stride == 32) anchor_group = 3; auto feature_ptr = feat; for (int h = 0; h <= feat_h - 1; h++) { for (int w = 0; w <= feat_w - 1; w++) { for (int a = 0; a <= anchor_num - 1; a++) { if (feature_ptr[4] < prob_threshold_unsigmoid) { feature_ptr += (cls_num + 5); continue; } //process cls score int class_index = 0; float class_score = -FLT_MAX; for (int s = 0; s <= cls_num - 1; s++) { float score = feature_ptr[s + 5]; if (score > class_score) { class_index = s; class_score = score; } } //process box score float box_score = feature_ptr[4]; float final_score = sigmoid(box_score) * sigmoid(class_score); if (final_score >= prob_threshold) { float dx = sigmoid(feature_ptr[0]); float dy = sigmoid(feature_ptr[1]); float dw = sigmoid(feature_ptr[2]); float dh = sigmoid(feature_ptr[3]); float pred_cx = (dx * 2.0f - 0.5f + w) * stride; float pred_cy = (dy * 2.0f - 0.5f + h) * stride; float anchor_w = anchors[(anchor_group - 1) * 6 + a * 2 + 0]; float anchor_h = anchors[(anchor_group - 1) * 6 + a * 2 + 1]; float pred_w = dw * dw * 4.0f * anchor_w; float pred_h = dh * dh * 4.0f * anchor_h; float x0 = pred_cx - pred_w * 0.5f; float y0 = pred_cy - pred_h * 0.5f; float x1 = pred_cx + pred_w * 0.5f; float y1 = pred_cy + pred_h * 0.5f; Object obj; obj.rect.x = x0; obj.rect.y = y0; obj.rect.width = x1 - x0; obj.rect.height = y1 - y0; obj.label = class_index; obj.prob = final_score; objects.push_back(obj); } feature_ptr += (cls_num + 5); } } } }修改
ax_yolov5s_my.cc
44行 const char* CLASS_NAMES[] = {"piggy"}; //修改模型类别名称
252行 for (uint32_t i = 0; i < io_info->nOutputSize; ++i)
{
auto& output = io_info->pOutputs[i];
auto& info = joint_io_arr.pOutputs[i];
auto ptr = (float*)info.pVirAddr;
int32_t stride = (1 << i) * 8;
// det::generate_proposals_255(stride, ptr, PROB_THRESHOLD, proposals, input_w, input_h, ANCHORS, prob_threshold_unsigmoid);
// 使用新的generate_proposals_n对预测框进行解码
det::generate_proposals_n(1, stride, ptr, PROB_THRESHOLD, proposals, input_w, input_h, ANCHORS, prob_threshold_unsigmoid);
}
- 修改
ax-samples/examples/CMakeLists.txt文件,在101行下新增
101行 axera_example (ax_crnn ax_crnn_steps.cc)
axera_example (ax_yolov5_my ax_yolov5s_my.cc) //增加编译源文件
else() # ax630a support
axera_example (ax_classification ax_classification_steps.cc)
axera_example (ax_yolov5s ax_yolov5s_steps.cc)
axera_example (ax_yolo_fastest ax_yolo_fastest_steps.cc)
axera_example (ax_yolov3 ax_yolov3_steps.cc)
endif()
- 对工程进行交叉编译或者板上直接编译,生成
ax_yolov5_my可执行程序文件
2.将程序和joint模型文件拷到板上同一目录内,执行:
./ax_yolov5_my -m yourModel.joint -i /home/images/test.jpg
--------------------------------------
[INFO]: Virtual npu mode is 1_1
Tools version: 0.6.1.14
4111370
run over: output len 3
--------------------------------------
Create handle took 470.84 ms (neu 21.46 ms, axe 0.00 ms, overhead 449.38 ms)
--------------------------------------
Repeat 1 times, avg time 25.28 ms, max_time 25.28 ms, min_time 25.28 ms
--------------------------------------
detection num: 6
0: 97%, [ 198, 97, 437, 328], piggy
0: 96%, [ 35, 190, 260, 377], piggy
0: 95%, [ 575, 166, 811, 478], piggy
0: 93%, [ 526, 47, 630, 228], piggy
0: 91%, [ 191, 55, 301, 197], piggy
0: 76%, [ 0, 223, 57, 324], piggy
[AX_SYS_LOG] Waiting thread(2971660832) to exit
[AX_SYS_LOG] AX_Log2ConsoleRoutine terminated!!!
exit[AX_SYS_LOG] join thread(2971660832) ret:0
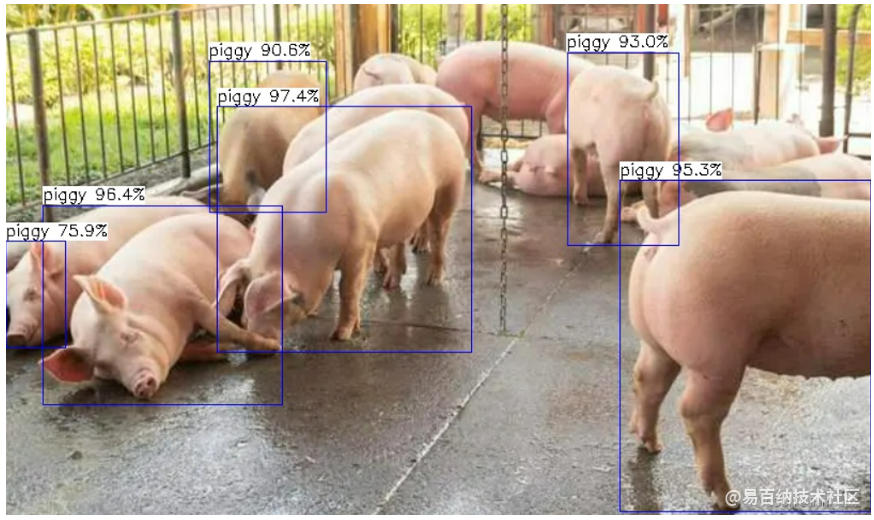
可以看到,即使此时分了一半算力给isp,yolov5s单张图片的推理时间可以去到25ms,那是相当给力了!
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:4281次2024-03-05 15:34:48
-
浏览量:4179次2022-07-03 00:53:51
-
浏览量:2040次2024-01-16 18:03:56
-
浏览量:6380次2021-04-07 09:53:09
-
浏览量:5935次2024-05-23 13:45:40
-
浏览量:4243次2020-09-30 18:33:31
-
浏览量:3803次2024-01-19 17:42:50
-
浏览量:6203次2021-04-06 17:40:39
-
浏览量:2011次2025-02-28 15:03:44
-
浏览量:5870次2024-03-05 15:05:36
-
浏览量:3380次2024-02-23 17:41:04
-
浏览量:10261次2022-03-23 10:50:32
-
浏览量:4516次2024-02-04 17:13:47
-
浏览量:3475次2024-03-06 16:15:59
-
浏览量:4758次2024-01-18 18:05:38
-
2024-02-02 14:41:10
-
浏览量:5618次2022-10-31 15:07:27
-
2024-12-10 11:13:53
-
浏览量:3842次2024-01-05 16:46:11

95后IT男神
暂无个性签名~




-
5篇
- Jetson Nano之ROS入门 -- YOLO目标检测与定位
- 【爱芯元智】【AX650】【系统】AX650N DEMO 板 NPU 示例说明
- 从滑动窗口到YOLO、Transformer:目标检测的技术革新
- 使用YOLOv8和PySimpleGUI构建目标计数GUI
- 使用的darknet实现区域人头统计、目标跟踪
- Nvidia Jetson 平台 DeepStream-6.0.1 部署 YoloV5-6.0 实现目标检测
- YOLOv4 caffemodel转om在Atlas服务器上面推理
- 爱芯元智AX630编译linux系统安装环境到emmc
- 【案例分享】手把手让你具备——配件放置规范识别算法
- 【爱芯元智】【AX650】【解决方案】M.2算力卡简介
-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
95后IT男神

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
